
Use of geometry and featural cues in landmark configurations to reorient DCD children to the VR space: A route-learning study
Uso de señales geométricas y caracterológicas en configuraciones de puntos de referencia para reorientar a los niños con TDC hacia el espacio de realidad virtual: Un estudio de aprendizaje de rutas
Chrysanthi Basdekidou, Athanasios Styliadis , Alexandros Argyriadis, Levente Dimen
Abstract
Background: Working memory-based spatial cognition has attracted the attention of the scientific community in navigation and reorientation projects. The dominant approach considers that spontaneous spatial navigation behavior is based merely on environmental geometry (built and natural environmental objects). In this domain, DCD (Developmental Coordination Disorder) motor skill orientation problems have been frequently associated with poor visuospatial cognition, while immersive VR environments encourage more repetition, allowing for faster motor skill development and recovery.
Objective: This pilot study tested the functionality of an immersive VR environment with environmental geometry (rectangular arena rich in symmetry) and featural landmark cues (striped wall, flora) as a route-learning tool for children with motor skill disorders.
Methods: Forty DCD children aged 5 to 8 years (20 boys and 20 girls); five (5) 3D reality modeling setups with orthogonality, symmetry, and striped walls as design parameters; and trial walk-through coordination exercises using a predefined visual pathway with different motor control conditions (daylight, darkness). Participants’ path completion rate, path completion time, and walk-through satisfaction were recorded as route-learning performance variables and analyzed statistically.
Results/findings: DCD children’s spatial orientation was statistically shown to be more stable and robust (in path completion rates, termination time, and walk-through level of satisfaction) in a virtual 3D environment rich in orthogonality, symmetry, and featural cues as landmarks. In this compound environmental geometry setup, training functionality and immersive learning performance enjoyed an 8.16% better path completion rate, a 12.37% reduction in path completion time, and 32.10% more walk-through satisfaction than reality modeling setups poor in geometry and landmarks. The effectiveness and robustness were validated statistically.
Conclusion: Children with motor skill difficulties train and learn better in virtual 3D environments that are rich in orthogonality, symmetry, and featural landmark cues.
Keywords
Motor skill disorder; DCD; immersive virtual reality; VR route training and learning; spatial orientation; environmental geometry; natural landmark coordination cues; walk-through satisfaction; geometric perception; reality modeling; visual reorientation reasoning; visual working memory
Resumen
Antecedentes: La cognición espacial basada en la memoria de trabajo ha atraído la atención de la comunidad científica en proyectos de navegación y reorientación. El enfoque dominante considera que el comportamiento espontáneo de navegación espacial se basa meramente en la geometría ambiental (objetos ambientales construidos y naturales). En este ámbito, los problemas de orientación de las habilidades motoras del TDC (Trastorno del Desarrollo de la Coordinación) se han asociado con frecuencia a una cognición visoespacial deficiente, mientras que los entornos de RV (Realidad Virtual) inmersivos fomentan una mayor repetición, lo que permite un desarrollo y una recuperación más rápidos de las habilidades motoras.
Objetivo: Este estudio piloto probó la funcionalidad de un entorno de RV inmersiva con geometría ambiental (arena rectangular rica en simetría) y señales de puntos de referencia característicos (pared rayada, flora) como herramienta de aprendizaje de rutas para niños con trastornos de la habilidad motora.
Métodos: Cuarenta niños con TDC de entre 5 y 8 años (20 niños y 20 niñas); cinco (5) configuraciones de modelado de realidad 3D con ortogonalidad, simetría y paredes rayadas como parámetros de diseño; y ejercicios de coordinación de recorrido de prueba utilizando una ruta visual predefinida con diferentes condiciones de control motor (luz diurna, oscuridad). Se registraron la tasa de finalización del recorrido, el tiempo de finalización del recorrido y el grado de satisfacción de los participantes como variables de rendimiento del aprendizaje de recorridos y se analizaron estadísticamente.
Resultados: Se demostró estadísticamente que la orientación espacial de los niños con TDC era más estable y robusta (en tasas de finalización del camino, tiempo de finalización y nivel de satisfacción del recorrido) en un entorno 3D virtual rico en ortogonalidad, simetría y señales de características como puntos de referencia. En esta configuración de geometría ambiental compuesta, la funcionalidad del entrenamiento y el rendimiento del aprendizaje inmersivo disfrutaron de un 8,16% más de tasa de finalización de ruta, una reducción del 12,37% en el tiempo de finalización de ruta y un 32,10% más de satisfacción de recorrido que las configuraciones de modelado de realidad pobres en geometría y puntos de referencia. La eficacia y la solidez se validaron estadísticamente.
Conclusiones: Los niños con dificultades motrices entrenan y aprenden mejor en entornos virtuales 3D ricos en ortogonalidad, simetría y puntos de referencia característicos.
Palabras clave
Trastorno de la habilidad motora; TDC; realidad virtual inmersiva; entrenamiento y aprendizaje en rutas de RV; orientación espacial; geometría ambiental; claves de coordinación de puntos de referencia naturales; satisfacción en el recorrido; percepción geométrica; modelado de la realidad; razonamiento de reorientación visual; memoria de trabajo visual.
Introduction
VR in occupational therapy
Applications of immersive virtual reality (VR) in occupational therapy (OT) have been extensively reported in the last few years in the adult population [1-4]. However, despite extensive research on children’s intellectual capacities [5], there is limited research-based evidence on how young patients experience VR [6].
VR has been shown to encourage repetition with low-cost virtual and controlled trial exercises, allowing for faster motor skill development, ADL (Activities for Daily Living) autonomy, and brain recovery [7,8]. The effectiveness of traditional rehabilitation (TR) approaches is well demonstrated by several studies [9-13]. These approaches are based on one-to-one interaction and require expensive equipment. However, recent studies based on the augmentation of specific kinematic feedback (virtual exercise trials) show improvement in motor skill functionality [14]. Combined with TR methods and techniques [9-13], virtual therapy (VR-controlled trials, reinforced feedback in a virtual environment (RFVE) [1,7,8], and gamification [14]) promises better results in OT for patients with disorders.
Furthermore, there is a lack of reports and scientific knowledge for VR-based simulated learning contributions required in medical therapy [15] in the OT curricula, though there is strong evidence of VR use in health professionals’ education and training [16].
Recent publications on OT evaluation (e.g., usability, patient satisfaction, and exercise trial performance) show drawbacks and problems related to the availability of therapy, real-time data access, a generic clinic environment, and delays in feedback reports [17,18]. These shortcomings could be addressed through immersive VR-based OT, which increases the availability of therapy while keeping the cost low, provides access to data and big data access in real-time or near real-time, offers personalized clinic virtual environments, and reports training feedback in real-time [17-21].
Spatial reorientation behavior
A long time ago, an exceptional set of trial tests revealed that muddled rats and chicks depended on the shape of the test field to return to a nourishment source, disregarding milestone geometry or other “featural” cues such as striped walls, designed boards, and characteristic odors [22,23]. These reports inspired the claim that reorientation is based only on the geometry of the natural or built environment and is free from the control of other featural cues [24]. Cognitive processes underlying spatial behavior, and many studies on reorientation have followed a wide assortment of species, including birds and humans [25-27]. However, these results have been incoherent, and their interpretations are frequently disputed. A critical point in this debate is that there are no defined standards or clear rules for what should be taken as evidence for or against a stable spatial framework (modularity) [28].
In these earlier works [23,29], the failure to use featural cues in conjunction with environmental geometry to control spatial behavior was presented as the strongest demonstration of encapsulation [30]. Other trials showed that although animals and human children could learn to use features to confine their searches to the goal location, their success often relied only on those cues that were placed very close to the target location; that is, when local features at the target were removed, animals no longer showed a preference for the goal based on spatial relationships with respect to the remaining featural cues (e.g., rats [23], chicks [31], children [32]). Arguments for or against modularity have often been made based on interactions (or lack thereof) between environmental geometry and features (featural cues) [33].
The ability of animals to find important goals in their environment has been said to require a form of learning that is qualitatively different from that normally studied in the conditioning laboratory. Such spatial learning has been said to depend upon the construction of a global representation of the environment, and the acquisition of knowledge about the position of goals with reference to this representation is said to be unaffected by the presence of other cues or landmarks. To evaluate the first of these claims, experiments that investigate the extent to which the effects of training in one environment transfer to another are described. To evaluate the second claim, experiments are described that investigate whether cue competition effects normally found in conditioning studies can be found in spatial tasks. Overall, the results indicate that most of the phenomena of spatial learning can be explained by the principles of associative learning. The implications of the reported results towards an understanding of the neural mechanisms of spatial learning are considered [33]. The presence of geometric cues overshadowed learning about the landmarks when they were white but enhanced learning when the landmarks were black [34].
A wide range of studies have demonstrated the associative effects of feature learning on geometry-based spatial mapping [35], within-compound associations between geometry and features [36-38], and the potentiation of geometry learning by featural cues [39,40-43]. All these studies have shown that non-geometric features can interact with the progression of geometric learning. Spatial reorientation with natural objects (e.g., trees, plants, man-made constructions, etc.) is often projected into avian navigation and robot georeferencing applications [44,45]. Spatial cognition with landmark coordination cues (e.g., built-environment linearity) is usually applied to geo-referencing [44,46], walking coordination [46,47], and motor skill reasoning [45-48].
Spatial reorientation behavior is an active research topic compatible with the previously discussed topic of “VR in occupational therapy.”
VR route-learning in DCD children
Movement coordination in children with motor difficulties is an active research topic [49-52]. The visual contribution to motor skill DCD disorders has also attracted the attention of the scientific community in recent years [45,46,53-55]. Motor skill learning and the therapeutic potentiality of DCD children in immersive VR-based controlled exercise trials have also been a topic of recent reports [56,57].
Finally, reports about the environmental and featural influences on motor coordination in DCD children highlight the importance of spatial cognition in motor skill route learning approaches [58-61], the role of symmetry in geometric intelligence [62], the effects of reduced vision on spatial orientation ability using VR [63], the differential prioritization of cue and boundary information in spatial navigation [64], the role of landmarks as beacons and associative cues in route learning [65], and the language of geometry (primitives and rules) in preschoolers [66].
VR route training and learning in children with DCD is an active research topic compatible with the previously discussed two topics of “VR in occupational therapy” and “spatial reorientation behavior.”
Research concept and main hypotheses
The proposed research concept is defined as follows: “DCD children's route-learning performance, with in-route completion rate, termination time, and children’s satisfaction as the three dependent variables, is affected by built-environment geometry and featural cues as the independent variable/factor.”
According to both theoretical [18,22,34,35,65] and empirical literature [6,10,17,37,38,65], route-learning for rats, chicks, and humans is aided by the use of landmarks as beacons and featural cues [29,31,32,35]. Accordingly, the initial hypothesis for our study on DCD children's reorientation and spatial cognition is formulated as follows: “The use of landmarks as beacons and associative cues in a geometric environment that is rich in symmetry and featural cues affects DCD children’s completion rate, time and satisfaction, and the relative study involves route-knowledge and spatial cognition functionality for spatial reorientation behavior.” The route-learning process is user-oriented and may depend on the participant’s performance dimensions (with path completion rate, termination time, and satisfaction as dependent variables), the geometry of the built environment (the independent variable), and landmark functionality (operating as a beacon, an associative cue for action, an azimuthal cue, a configuration of several landmarks, etc.) [29,32,65]. Hence, the final main hypothesis is derived from the initial hypothesis presented above. It combines the above-presented three popular scientific topics, takes advantage of the ongoing research conducted per topic, and is formulated as follows:
“Immersive VR-based walk-throughs in digital environments rich in geometry and landmarks convey positional and directional information, thus enhancing participants’ performance in terms of completion rate, time, and satisfaction. As such, these environments are ideal for DCD route-learning studies that incorporate spatial reorientation, route-knowledge, and spatial cognition functionality.”
According to the stated hypothesis, the “spatial compound linear geometries” (linearity) usually found in urban built environments operate as landmarks with beacon functionality in plain orthogonal geometric arenas and as landmarks with associative cue functionality in rectangular arenas that are rich in symmetry. Furthermore, in bounded VR environments (with distinct, geometrical features), striped walls and flora objects (trees, plants) operate as landmarks with associative cue functionality.
Variable analysis and null hypothesis
The proposed concept is subject to trial VR exercises (experiments) and statistical effectiveness evaluations with path completion rate (PCR), path completion time (PCT), and walk-through level of satisfaction (WTS) defined as the three dependent route-learning performance variables of controlled visual walk-throughs (i.e., the three route-learning performance dimensions operating as with-subject factors).
As environmental setups in immersive VR configurations, geometric and featural cues operate as landmarks with positional and directional functionality (the main between-subjects factor). Hence, the geometric and featural cues of the environmental boundary configuration are defined as the main independent variable (“configuration setup” factor) with five (5) items and three design parameters: (i) the plain orthogonality as the primitive (1st level) geometric environment, (ii) the plain symmetry of rectangular elements as the secondary (2nd level) geometric environment, and (iii) the striped walls and flora (trees, plants) within a rectangular arena that is rich in symmetry as featural cues.
Moreover, the two (2) lighting conditions (daylight and darkness) are regarded as values of the independent variable (“light condition” factor). In addition, gender (male, female) is considered another independent variable (“DCD gender” factor) with two (2) items. Additionally, the three (3) different visualization and reality modeling software platforms are viewed as different values of the same independent variable (“software platform” factor). Finally, the six (6) visual trial pathways with different spatial cognition topologies are observed as different population values of the same independent variable (“trial pathway” factor).
The “null hypothesis” (H0) is that the DCD route-learning performance is not affected by any factor’s environmental setup discrete values (different configurations). Accordingly, the “alternative hypothesis” (Ha) is that the DCD route-learning performance is affected by the discrete values of the factor’s environmental setup (different setup configurations). A one-way ANOVA test is used to compare two means from two independent (unrelated) groups using the F-distribution. The null hypothesis for the test is that the two means are equal. Therefore, a significant result with F > 1 means that the two means are unequal.
Research questions
The following 11 research questions were defined to delimit the outline of the proposed DCD children reorientation and route-learning study in a VR space:
RQ#1. Does plain environmental geometry rich in linearity as a landmark affect the ability to move (positional and/or directional reorient functionality)?
RQ#2. Could 3D modeling symmetry and featural cues (striped walls, trees, plants) be considered auxiliary positional (geo-referencing) and/or directional tools for reorientation reasoning?
RQ#3. Does the particular type of landmark navigation functionality (i.e., function as beacons, as associative cues for action, as azimuthal cues, and as configurations) affect the route-learning process, and to what extent?
RQ#4. Do compound configurations of geometry and landmarks (environmental geometry rich in orthogonality, symmetry, and embedded distinct features) provide positional and directional information and, therefore, improve route learning, route knowledge (acquired during learning), spatial cognition, and self-confidence, and to what extent?
RQ#5. Do different configurations of the factors (environmental setup) affect the path completion rate (PCR) of the dependent variable, and to what extent does it do so?
RQ#6. Do different configurations of the factors (environmental setup) affect the path completion time (PCT) of the dependent variable, and to what extent does it do so?
RQ#7. Do different configurations of the factors (environmental setup) affect the walk-through level of satisfaction (WTS) of the dependent variable, and to what extent does it do so?
RQ#8. Are there differences in route-learning performance dimensions (PCR, PCT, and WTS) in daylight and dark conditions?
RQ#9. Are there differences in route-learning performance dimensions (PCR, PCT, and WTS) according to DCD gender (male, female)?
RQ#10. Does a pathway’s variant (but with the same trip length and walking reorientation difficulties) spatial-cognition-topology in a route-learning trial affect performance dimensions (PCR, PCT, and WTS), and to what extent does it do so?
RQ#11. Does visualization and reality modeling software, beyond the environmental setups, affect DCD route-learning performance?
Research objective
The fourth research question (RQ#4) essentially encapsulates the first three (RQ#1, RQ#2, and RQ#3) and is discussed in this pilot study as the main research objective described by the following question: “Do geometry and feature configuration landmarks provide positional and directional information to improve DCD children's route-learning, and to what extent?" (Ha).
Aim
The main aim of this study is to reject the “null hypothesis” using one-way ANOVA analysis and then, with a confidence level of 95%, to identify landmark configurations that correlate between the three dependent route-learning variables (PCR, PCT, WTS outcomes measured in trials) and the independent variable (“environmental setup,” which causes the effect).
A secondary aim is to evaluate the visual contribution to DCD visual reorientation (positional and directional) reasoning of linearity/orthogonality (as primitive data in plain environmental geometry arenas operating as landmarks with beacon functionality), symmetry (as second-level data in compound environmental geometry arenas operating as landmarks with associative cue functionality), and distinct features/featural cues (as third-level data within combined rectangular arenas rich in symmetry operating as landmarks with associative cue functionality).
Materials & Method
Type of study
Null hypothesis: All environmental configuration setups have an equal effect on the dependent variables PCR, PCT, and WTS.
Alternative hypothesis: At least one configuration setup is different.
Significance level: a = 0.05
Equal variances were assumed for the analysis.
We followed repeated measures analysis using one-way ANOVA statistics to reject the “null hypothesis.” ANOVA is commonly used to test statistical differences between the means of two or more interventions. Then, the post hoc (Hsu’s multiple comparisons to the best (MCB)) test was applied to determine which environmental configuration setup is significantly different from the other setups (i.e., the “strongest” setup). Finally, a quantitative analysis without manipulation of the three dependent route-learning variables of a cross-sectional type with a descriptive (mean, std. dev) and correlative (r, p) study was performed [67-69].
Participants
Enrollment, intervention groups
This study was carried out between September 2020 and March 2023 at the INVR virtual and augmented reality camp in Thessaloniki, Greece. In the first four months of this period, forty (40) child participants with motor skill disorders (DCD) aged 5 to 8 years old were enrolled at the camp. As motor skill difficulties are commonly diagnosed in elementary schools in Europe, the participants were recruited from their education unit with the help of developmental and community pediatricians, psychologists, and physical and occupational therapists. The 40 participants (20 boys and 20 girls) were grouped into one intervention team (group).
Ethical consent
The studies involving human/children participants were reviewed according to the Declaration of Helsinki and the doi: 10.1089/cyber.2019.0269. Liverpool John Moores Ethics Committee. All children agreed to participate, and before the tests, parents or legal guardians gave their informed consent. The departmental review and research ethics board of the Landscape Architecture Department / University of Kavala Institute of Technology (City of Drama, Greece) approved this study.
Eligibility
The inclusion criteria for the DCD participants were age 5 to 8 years with a current diagnosis of DCD by a registered health care provider and right-handed (hand used for writing). Those with pre-term birth (<36 weeks' gestation) or any neuropsychiatric, neurological, and/or chronic disorders were excluded from the study. Participants were screened to ensure they met the clinical criteria for DCD outlined in the Diagnostic and Statistical Manual of Mental Disorders (DSM-5, 5th edition) [70].
Instruments
Head-mounted display equipment
All DCD participants performed the exercises with head-mounted display equipment (i) in daylight without any time anxiety and (ii) in darkness without any time anxiety.
3D modeling software & VR route-learning simulators (creation, visualization, route-learning analysis)
For the creation of the 3D trial arena and the VR route learning, the following software platforms were used:
(i) Intuitive 3D modeling CAD software with native VR interoperability (Bentley’s iTwin open and scalable platform integrated with NVIDIA’s Omniverse) and
(ii) Immersive training and learning software for real-time interactive story-based VR visualization and immersive experience with photorealistic lighting and environmental effects on multiple devices, including Web browsers and VR headsets (Bentley’s LumenRT as the basic visualization and reality modeling software, the Warp VR app, and Stanford’s Strivr app for the performance validation test).
Using the above platforms, participants were able to virtually explore urban and offshore structures as if they were walking through the infrastructure in real-time for purposes such as wayfinding and safety route optimization. The software platforms were obtained courtesy of the Department of Forest and Natural Environment Sciences / International Hellenic University, Greece.
GUI dialog box for VR route-learning (recording DCD motor responses to environmental geometry and featural cues)
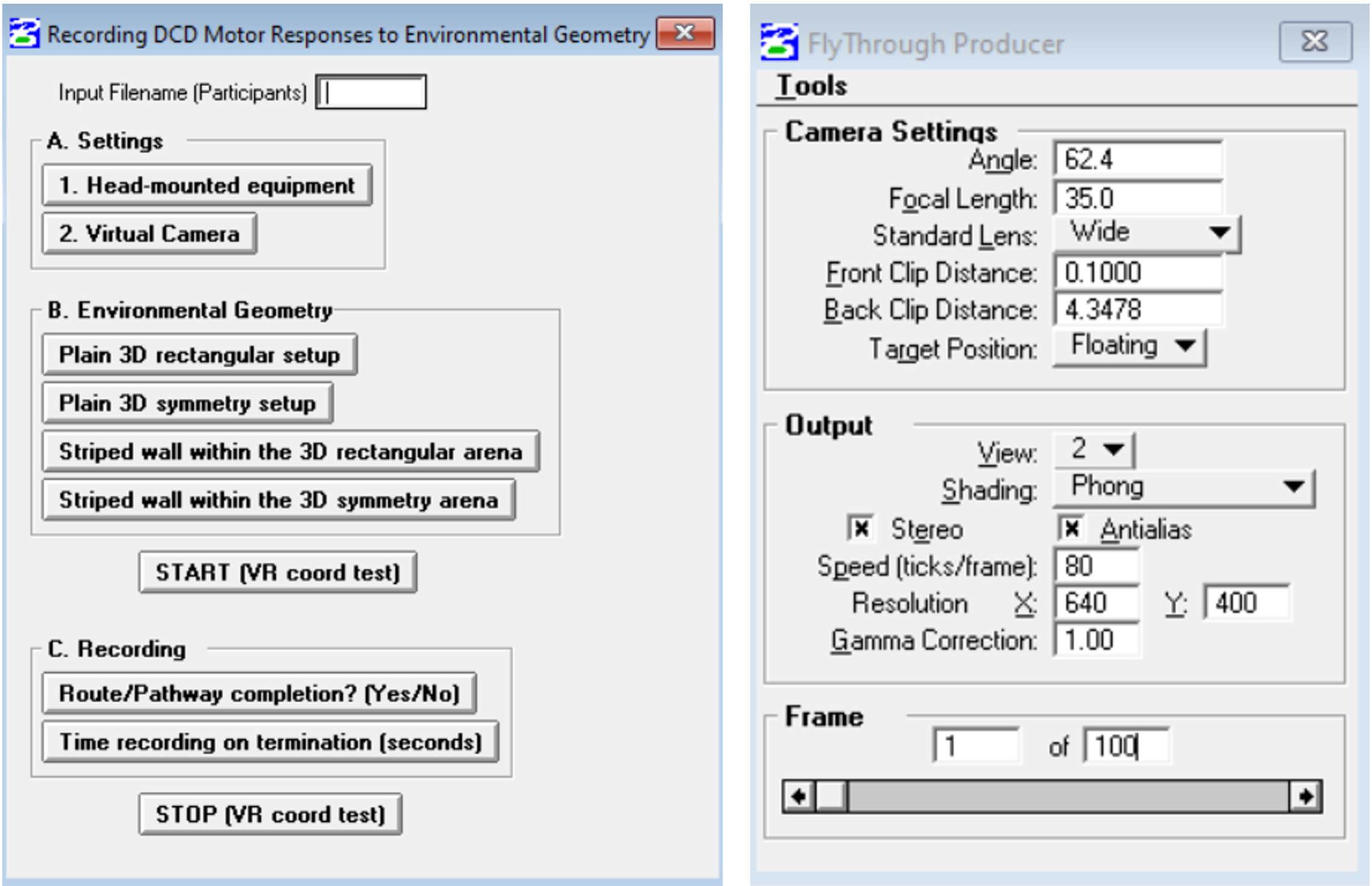
A software routine was developed to support the first graphical user interface (GUI) dialog box for a controlled head-mounted fly-through during the VR trial exercises (coordination tests). Path completion rate and termination time performance were recorded while the coordination tests’ supervisor had exclusive responsibility for the function of this GUI dialog box (Figure 1, left).
Figure 1. [Left] The dialog box for the VR route-learning test. [Right] The dialog box for the digital camera’s parameters (FlyThrough Producer).
VR route-learning dialog items
Head-mounted equipment settings, virtual camera settings, trial case selection (A, B, C, D, and E setups for virtual-urban 3D environments), START VR route-learning test, route/pathway completion? (Yes/No), time recording on termination (seconds), and STOP VR route-learning test (Figure 1, left).
GUI dialog box for the digital camera
The visual navigation in the five (5) 3D digital environmental setups was supported by a digital camera. Accordingly, another GUI dialog box has been developed for this purpose (Figure 1, right).
Virtual camera dialog items (fly-through producer)
The “2. Virtual Camera” dialog item was connected to a digital virtual camera on an event-driven programming basis (Figure 1, left). Video simulation involving route-learning and spatial reorientation with action-heavy content requires footage recorded in 4K UHD quality (2.160 p.). With this high-resolution video, the playback looks smoother and more fluid. The higher-resolution video looks better with higher frame rates because the higher the frames per second, the slower the “slow-motion” footage will be. For instance, any frame rate >30 fps (i.e., more than 30 distinct still images are shown in play-back per second) will be ideal for occupational therapy VR/AR/MR exercises for patients with disorders.
The “fly-through control GUI dialog” supports frame rates up to 70 fps (it is not possible for a normal human eye to perceive more than 60 fps. Ticks are the way CAD software views increments of time. There are 4,800 ticks in a second, so a digital camera can actually access time down to 1/4800th of a second. Given a standard NTSC video frame rate, there are 30 frames in a second and, therefore, 160 ticks in each frame. As such, for the proposed VR training and learning trial exercises with a 60-fps rate, 80 ticks/frame were needed [71,72].
Hence, for the best and most realistic-looking motion blur, the following digital camera parameters were used in the VR trials: Shutter angle (FoV/Field-of-View): 62.4o; Focal length (f): 35mm; Lens: Wide (option from telescopic to fish-eye); Camera’s target position: Floating (option: fixed); Video recording speed: 80 time-ticks/frame; Visual pathway route-segmentation “Frames”: 100 (Figure 1, right).
Study design
The overall design of the presented DCD route-learning study consists of two distinct parts. Part A includes one (1) visualization and reality modeling software, one (1) predefined trial visual pathway, five (5) environmental setups (trial scenarios) with different configurations (built-environment geometry, flora, and featural cues) regarded as different values of the same independent variable or factor (“configuration setup”), and twenty-five (25) trial rounds. This part of the study aimed to answer the first nine research questions (RQ#1-RQ#9) and was completed in approximately a 100-day time window ((i.e., 40 DCD children x 4 min/trial setup + a 30-min time break between setups) x 5 trial setups x 25 rounds x 2 lighting conditions (daylight, darkness) => 100-day time window / April-July 2022).
Part B presents three (3) different visualization and reality modeling software platforms regarded as different values of the same independent variable or factor (“software platform”), six (6) trial visual pathways with different spatial cognitions but with the same trip-length and similar route-learning walking reorientation difficulties (3 in daylight and 3 in darkness conditions), one (1) environmental setup, and twenty-five (25) trial rounds. This part of the study aimed to answer the last two research questions (RQ#10-RQ#11) and was completed in approximately a 150-day time window ((i.e., 40 DCD children x 4 min/trial setup + a 30-min time interval between software change) x 3 software platforms x 25 rounds x 6 trial pathways (3 in daylight and 3 in darkness) => 150-day time window / September 2022-February 2023).
The route-learning trial campaign
The DCD route-learning trial campaign refers to one (six in part B) trial visual pathway projected into five (one in Part B’) different environmental configuration setups. The DCD participants walk through the visual pathway in an immersive VR environment, and their performance (in terms of the dependent variables PCR, PCT, and WTS) is recorded and analyzed statistically. DCD participants were able to virtually explore urban and offshore structures as if they were walking through the infrastructure in real time.
Trial visual pathway
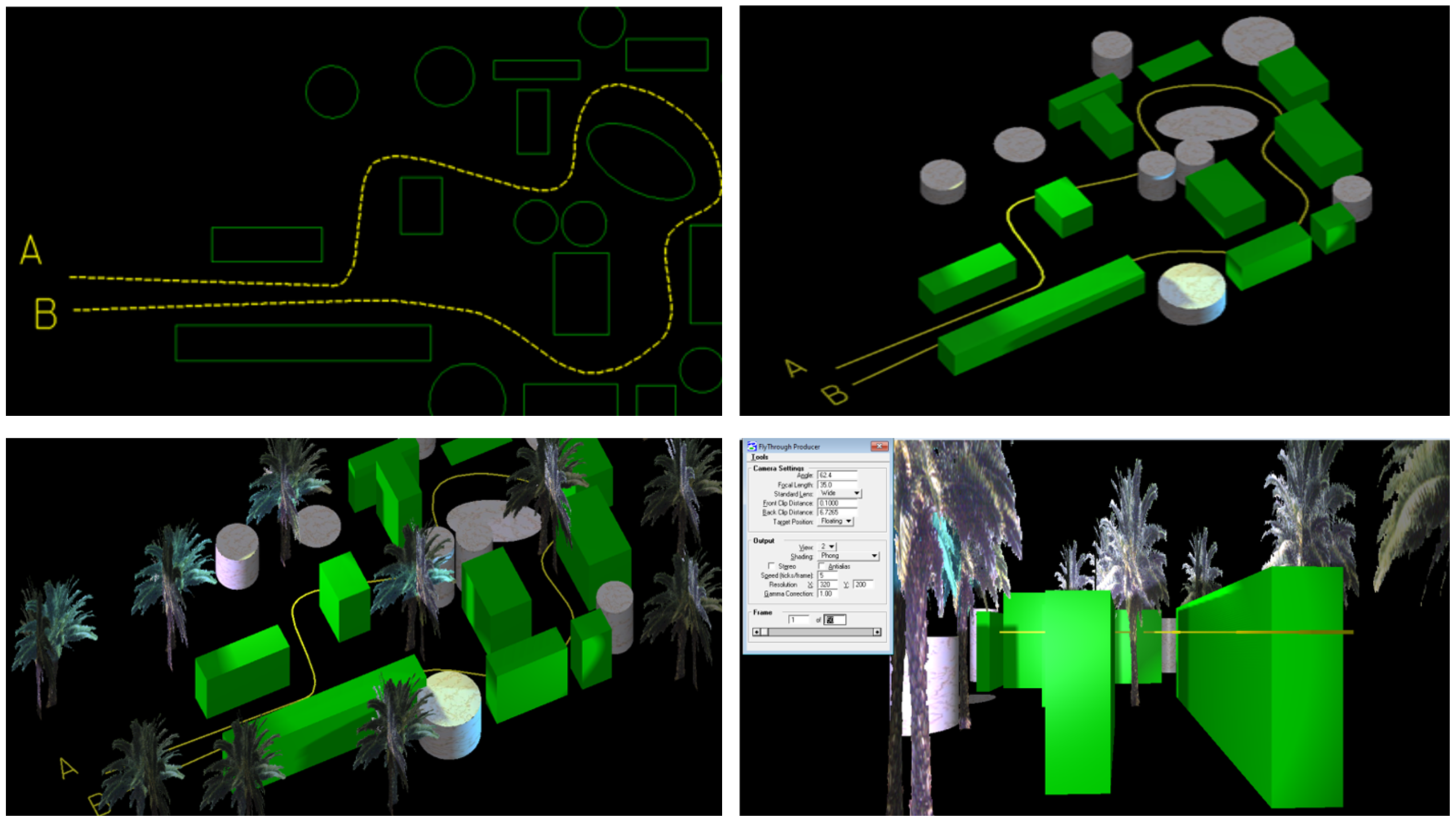
A visual pathway from predefined position A to predefined position B was designed for the trial (Figure 2). This pathway was used in all five trial environmental setups (A, B, C, D, E), each with a different walk-through visualization functionality (Figure 2).
Figure 2. Reality modeling setups with landmarks function as beacons and associative cues.
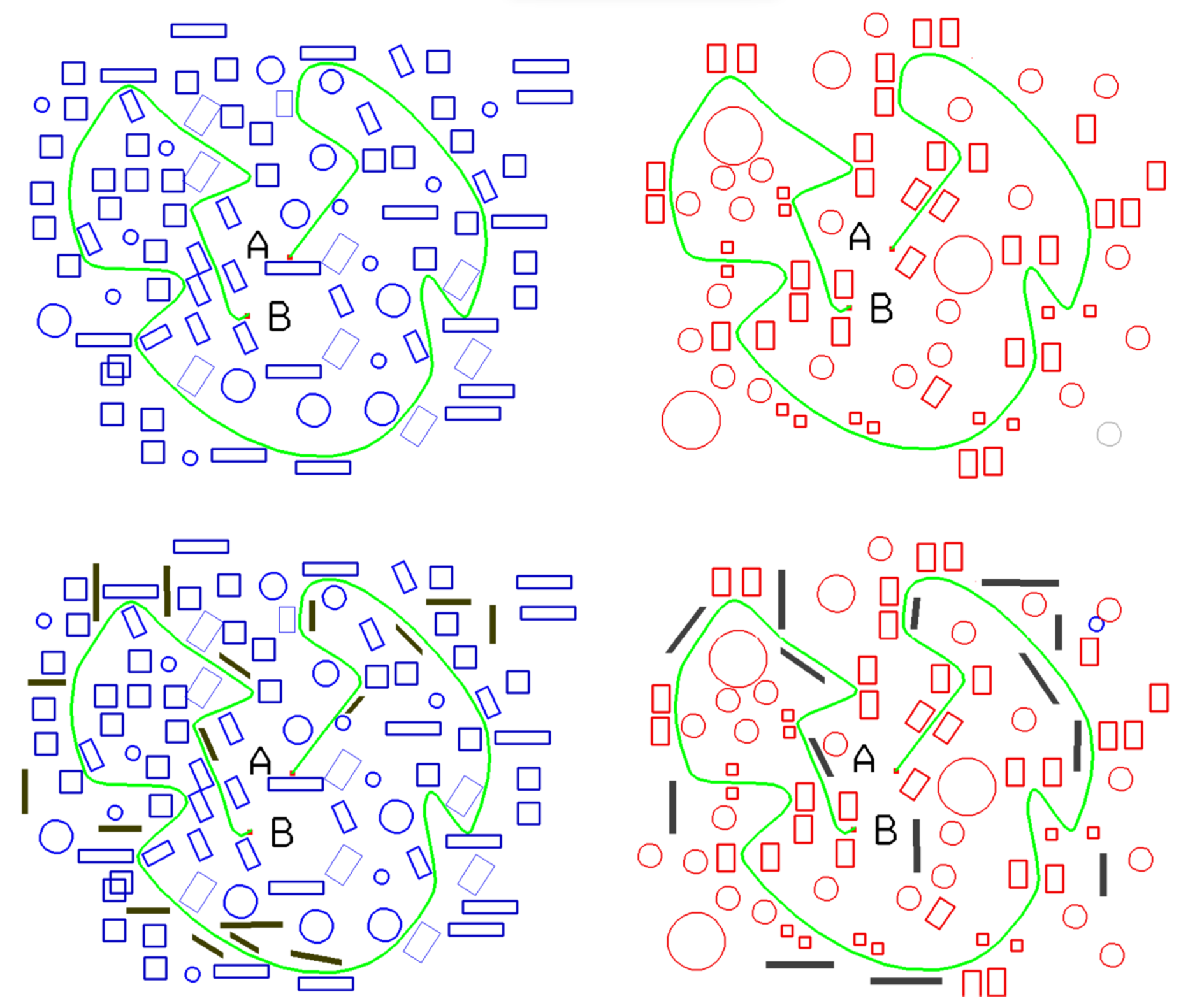
Note. [Top-left] Setup B [Top-right] Setup C [Bottom-left] Setup D [Bottom-right] Setup E.
Trial environmental setups
As walk-throughs from position A to position B, the visual route-learning exercises took place in five (5) intentionally designed virtual-urban 3D digital environments (reality modeling setups) developed in the selected CAD software platform. The first 3D environment was poor in rectangular structures, flora, and featural cues (case A’). The basic design parameters for the rest of the four digital environments were linearity and orthogonality (spatial compound linear geometries (i.e., orthogonal shapes) and mutually detected parallel or perpendicular line pairs in linear or rectangular geometries) as the basic environmental landmarks, symmetry as the secondary environmental landmark, and striped walls and flora (trees and plants) as the feature landmarks (natural objects) (Figure 2).
The second 3D digital environment reality modeling setup was designed with simple residential rectangular structures based on linearity and orthogonality (plain linearity and orthogonality as primitive environmental geometries) (case B’, Figure 2: Top-left). The third 3D digital environment was modeled with plain and several symmetrical linear and orthogonal structures (plain symmetry of rectangular structures as secondary environmental geometry) (case C’, Figure 2: Top-right). The fourth 3D digital environment was reconstructed with several striped walls within a plain rectangular arena (striped walls as primitive feature landmarks within a plain rectangular arena) (case D’, Figure 2: Bottom-left).
Finally, the fifth 3D digital environment was established with several striped walls and trees as feature landmarks within a rectangular arena rich in symmetry (striped walls, trees, and plants as second-level feature landmarks within a rectangular arena rich in symmetry) (case E, Figure 2: bottom-right).
Setup A: 3D environmental geometry poor in any type of landmarks.
Setup B: Plain 3D rectangular primitive geometry as beacon landmarks (i.e., plain linearity and orthogonality as beacon landmarks).
Setup C: Plain 3D symmetry with secondary geometry as beacon landmarks (i.e., compound parallel linearity and orthogonality as beacon landmarks).
Setup D: Single featural cues as associative cue landmarks (striped walls) within a 3D rectangular arena (i.e., 1st-level environmental geometry with 1st-level featural associative cue functionality).
Setup E: Multi-featural cues as configurations of landmarks (striped walls, trees, plants) within a 3D symmetrical arena (i.e., 2nd-level environmental geometry with 2nd-level associative cues and functionality).
Hence, the factor’s metadata information is defined as follows:
Factor: Configuration setup
Levels: 5
Values: setup A, setup B, setup C, setup D, and setup E.
Measures
VR coordination test
The VR route-learning test aims to record mean group performance in path completion rate (%), termination time performance (seconds), and walk-through level of satisfaction (rating scale levels 1 to 5). Group participants returned 25 times (on a 30-minute break interval between the five trial setups) to repeat the five visual reorientation tests. Assessments were video recorded, and walk-through satisfaction was blindly scored offline. The four trial case setups rich in landmarks (linearity, orthogonality, striped walls, trees, plants) were designed in such a way that all four environments (B, C, D, E) provided beacon cue functionality, environmental arenas C and E produced symmetry associative cue functionality, and the compound route-learning arenas D and E enjoyed first- and second-level featural associative cue functionality (Figure 2).
Route-learning Procedures
Type of landmarks
Landmarks represented by geometry (linearity, orthogonality, rectangularity, etc.) or features (striped walls, trees, plants, etc.) have a beneficial effect on route-learning processes [35,65]. Landmarks can serve as beacons (e.g., a 3D orthogonal box), associative cues for action (e.g., a tree at the corner of a rectangular square), azimuthal cues (e.g., a virtual sun in a VR arena), and as configurations of landmarks (e.g., piloting in navigation) [73-79].
Route-learning tasks and functionality
In route-learning, the difference between “beacon-based” and “associative cue-based” landmark functionality is in accordance with recognition learning tasks (single item information from a set of self-referenced stimuli landmarks) and cued recall learning tasks (landmark and a directional action from a sequence of paired items), respectively [65]. In beacon-based recognition learning, the traveler is exposed over the course of learning to a set of referencing stimuli and beacon landmarks. So, beacon landmarks identify positional functionality. In associative cue-based cued recall learning, the traveler is exposed to a sequence of paired items (associative cue landmark and a directional action) over the course of the lesson. In this situation, associative cue landmarks are used to specify directional functionality. In configuration-based bounded learning, the traveler is exposed to a set of combined referencing and directional landmarks over the course of the lesson. In this situation, configurations of landmarks signalize both positional and directional functionality.
Route-learning tasks and processes
Route learning, which is based on associative cues for action landmarks as a cued recall learning task, is a time-consuming process (i.e., it supports directional but time-consuming functionality). Route-learning, which is based on beacons as a recognition learning task, is a simple self- or geo-referencing process (i.e., characterized by positional referencing functionality); and route-learning, which is based on configurations of landmarks as a bounded learning task, is a complicated process (i.e., enjoying directional and positional functionality).
Results
A VR-based DCD route-learning case study was performed, and screenshots (screen-capture photography) from the four environmental modeling setups are presented in Figure 2. Participants wore head-mounted displays, and the visual pathway for each trial case started from position A, finished at position B, and lasted about two (2) minutes.
The five (5) 3D digital environments were implemented using Bentley’s iTwin modeling software with native VR interoperability and functionality, and the VR visualization and simulation immersive route-learning experience was performed using Bentley’s LumenRT platform. To ensure the reliability of the statistical analysis, a total of twenty-five (25) visual reorientation route-learning pathway tests from position A to position B were performed spontaneously per trial environmental setup (A, B, C, D, E) in a visuospatial working memory base, with 30-minute time breaks between the five trial setups (i.e., a 2-day time window per round x 25 rounds).
In all trials, the pathway was the same (A(B), and the supervisor’s task was to record the values for the three variables per participant: PCR (binary value), PCT (seconds), and WTS (offline rating with integer values in the scale 1-5) (Tables 1 and 2).
Table 1. “Configuration setup”: 40 DCD children - Daylight conditions.
| Path completion rate (%) | PCT-Termination time (seconds) | Walk-through satisfaction (1-5) | Time-Satisfaction correlation | ||
|---|---|---|---|---|---|
| mean (Std.) | Mean (Std.) | r | p | ||
| Setup A | 69 | 196.12 (13.903) | 1.22 (0.99424) | -.880* | <.001 |
| setup B | 84 | 161.80 (14.652) | 2.45 (1.31689) | -.910* | <.001 |
| setup C | 86 | 157.22 (14.005) | 2.80 (1.11850) | -.921* | <.001 |
| setup D | 92 | 142.60 (12.546) | 3.80 (0.89443) | -.972* | <.001 |
| setup E | 95 | 138.29 (11.798) | 4.22 (0.83871) | -.988* | <.001 |
| Effect of the “configuration setup” factor on route-learning performance dimensions in daylight conditions (“light condition” factor) | F(1,107)=21.82, P<0.002, n2<0.62 | F(1,122)=14.93, P<0.001, n2<0.05 | F(1,155)=16.80, P<0.0001, n2<0.5 | ||
Note. n=40-participant group mean values from 25 trials; *: Correlation is significant at the 0.010 level (2-tailed).
Table 2. “Configuration setup”: 40 DCD children - Darkness conditions.
| Path completion rate (%) | PCT-Termination time (seconds) | Walk-through satisfaction (1-5) | Time-Satisfaction correlation | ||
|---|---|---|---|---|---|
| mean (Std.) | Mean (Std.) | r | P | ||
| Setup A | 61 | 267.26 (13.903) | 0.55 (0.88924) | -.793* | <.001 |
| setup B | 78 | 209.11 (18.072) | 1.81 (1.11787) | -.945* | <.001 |
| setup C | 81 | 183.20 (15.803) | 2.32 (1.11714) | -.951* | <.001 |
| setup D | 89 | 154.44 (12.941) | 3.53 (0.95447) | -.968* | <.001 |
| setup E | 94 | 144.58 (12.977) | 4.02 (0.93970) | -.981* | <.001 |
| Effect of the “configuration setup” factor on route-learning performance dimensions in darkness conditions (“light condition” factor) | F(1,107)=21.08, P<0.002, n2<0.33 | F(1,122)=13.62, P<0.001, n2<0.05 | F(1,155)=15.41, P<0.0001, n2<0.5 | ||
Note. Note. n=40-participant group mean values from 25 trials; *: Correlation is significant at the 0.010 level (2-tailed).
Environmental setups and route-learning variables
The coordinated forward progression toward a target while maintaining body balance and limiting energy expenditure and termination time is considered the basic principle in route-learning and route-knowledge case studies [31,32,35,65]. In this domain, the following three thesis statements, stating the relationship between the defined route-learning variables (PCR, PCT, WTS) and the corresponding environmental setups, were considered in the VR reorientation study:
Thesis statement I
The first dependent variable, “path completion rate,” should be regarded as route-learning mission-accomplishment information because its value refers to the percentage of those DCD children who successfully terminated the trial pathway (test). Hence, according to this hypothesis, the “path completion rate” variable is correlated to beacons, associative cues, configuration landmarks, and the relative environmental setups. The direction and the grade of this relationship per landmark type and setup are open issues.
Thesis statement II
The second dependent variable, “termination time performance,” should be regarded as route-learning directional information because its value is directly affected by DCD children’s decisions to turn left or right at route decision points and is therefore conceptualized as a time-consuming cued recall task in which the landmark function operates as a cue for DCD children's directional signal guiding reorientation [32,35,65]. Hence, according to this hypothesis, the “termination time performance” variable is correlated to associative cue landmarks and the relative environmental setups. The direction and the grade of this relationship are open issues.
Thesis statement III
The third dependent variable, “walk-through level of satisfaction,” should be regarded as route-learning positional information because DCD children’s self-confidence is derived from recognizing landmarks based on visual cues [39,65]. This self-confidence leads to satisfaction. Hence, according to this hypothesis, the “walk-through satisfaction” variable is related to beacon landmarks and the relative environmental setups. The direction and the grade of this relationship have yet to be determined.
All these thesis statements will be statistically tested as hypotheses (one-way ANOVA statistics and correlate/bivariate analysis by means, standard deviation, Pearson correlation (r), and sig (2-tailed) (p)) with the help of the relative values from Τables 1-5 in the next section.
Statistical Analysis
(A) Analysis of Variance: One-way ANOVA F-distribution parametric test
For the one-way ANOVA statistics, the confidence level was set to 95% (p<0.05), and for the quantitative research without manipulation of the three dependent route-learning variables (non-experimental) of a cross-sectional type and with descriptive (mean, std. dev) and correlative (r, p) analysis, the statistical significance was set at p<0.010. The IBM SPSS Statistics version 29 software platform (IBM Inc., Chicago, IL, USA) was used for analysis.
The primary analysis was intention-to-treat, with three dependent variables (PCR, PCT, WTS) [38-40]. “Path completion rate,” a binary variable, was recorded online as a true/false value; “termination time,” a scale variable, was recorded online based on path completion time in seconds, while the variable “walk-through satisfaction” was rated offline using a 1 to 5 Likert scale (“1” no satisfied; “2” slightly satisfied; “3” satisfied; “4” very satisfied; and “5” extremely satisfied) and in this way the level of participants’ satisfaction is recorded (qualitative and ordinal variable).
As shown in Tables 1 and 2, for daylight and darkness conditions, the calculated ANOVA parameters (F, p, n 2) related to the independent variable “setup” and the three dependent ones “PCR,” “PCT,” and “WTS,” respectively. In these two tables, the recorded mean values are calculated based on the 40 participants and the 25 trials, while PCT (time) and WTS (satisfaction) are the two variables in a correlate/bivariate analysis of the mean, std. deviation, Pearson correlation (r), and sig (2-tailed) (p).
Table 2 demonstrates the “configuration setup” factor results in daylight conditions (means from 1,000 measurements gathered from 40 DCD children and 25 trials / five setups).
The recruited one-way ANOVA parametric test determined that the associated “population” means are significantly different in general, and therefore, the “null hypothesis” is rejected. However, the test does not indicate which mean (configuration setup) is different. Differences between the means of configuration setups are a deviant and abnormal effect size because these differences merely designate the power of the relationship using values that only keep on the natural units of the dependent variables PCR, PCT, and WTS. The effect size helps to emphasize how relevant the findings are to a real-world situation. As such, we must determine which setup is significantly different by performing a post hoc (multiple comparisons) test with a significance level of 0.05.
(B) The strongest configuration setup: Hsu’s Multiple Comparisons to the Best (MCB) test
Hsu's MCB method is a multiple comparison method that is designed to identify which factor levels are the best, insignificantly different from the best, and significantly different from the best. O can define "best" as either the highest or lowest mean. This procedure is usually used after an ANOVA to more precisely analyze differences between level means. Hsu's MCB method creates a confidence interval for the difference between each level mean and the best of the remaining level means. If an interval has zero as an endpoint, there is a statistically significant difference between the corresponding means (Minitab Statistical Software). More specifically:
• If an interval has a “zero” value as an endpoint, there is a statistically significant difference between the corresponding means.
• If the interval does not have a “zero” value as an endpoint, the difference between means is not statistically significant.
| Highest is best (PCR, WTS) | Lowest is best (PCT) | |
| Confidence interval contains zero | No significant difference | No significant difference |
| Confidence interval entirely above zero | Significantly better | Significantly worse |
| Confidence interval entirely below zero | Significantly worse | Significantly better |
The largest mean was specified as the initial sample best for the PCR (“completion rate”) and WTS (“satisfaction”) cases because of its positive strength (i.e., hardness performance) in “completion rate” and “satisfaction” performance. Accordingly, the lowest mean was specified as the initial sample best for the PCT (“time”) case because the less “time,” the better performance.
In Hsu’s MCB method, a group is significantly better than another when the confidence interval has a “zero” value at an endpoint.
Hsu’s Multiple Comparisons to the Best (MCB) method was used to identify the level (i.e., the configuration setup) of the factor (independence variable) that is the best, the levels that are significantly different from the best, and the levels that are insignificantly different from the best. Hsu’s MCB compared setups A, B, C, and D to setup E using the best mean values for all dependent variables (PCR, PCT, and WTS). It is notable that the best configuration setup might not have the best mean due to some sampling errors (in some cases, groups that are not significantly different from the initial sample best one might have a more significant difference).
Interpretation - PCR case/daylight conditions (Table 1)
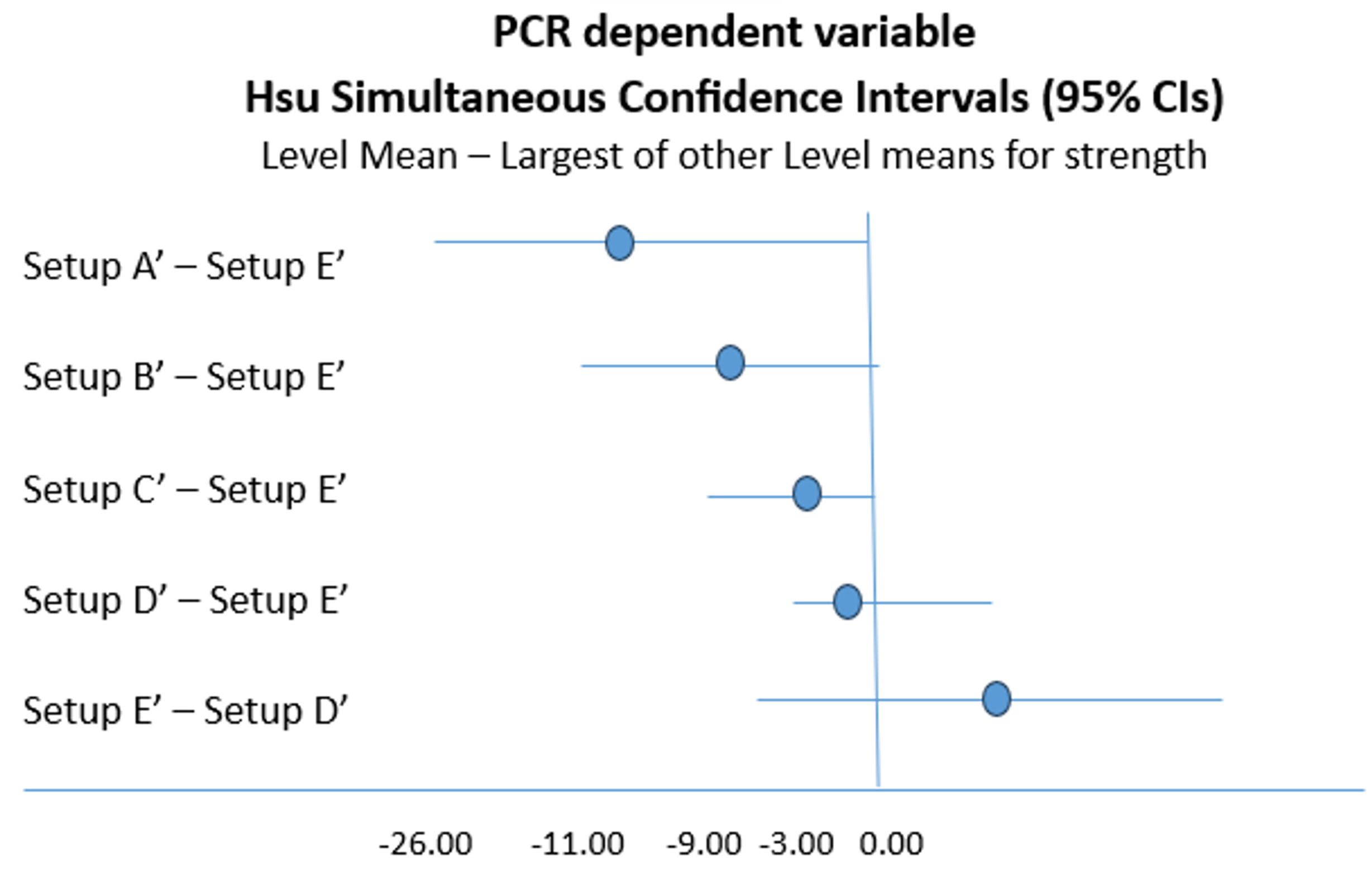
The means for setup A (69), setup B (84), setup C (86), and setup D (92) are all compared to the mean for setup E (95), which is the largest (i.e., the initial sample best) mean in the PCR dimension. Then, the mean for setup E itself is compared to the mean of setup D, which is the largest of the remaining four means. The results indicate the following: the confidence intervals for the difference between the mean of setup E and the means of setup A (-26 to 0), setup B (-11 to 0), and setup C (-9 to 0) indicate that these differences are significant because all three intervals have a “zero” value as an endpoint. The remaining two intervals (i.e., setup D - setup E and setup E - setup D’) do not have “zero” as an endpoint, which indicates that the differences are not significant (Figure 3A).
Figure 3A. Hsu’ MCB test - Simultaneous Confidence Intervals (95% CIs) for PCR case.
Interpretation - PCT case/daylight conditions (Table 1)
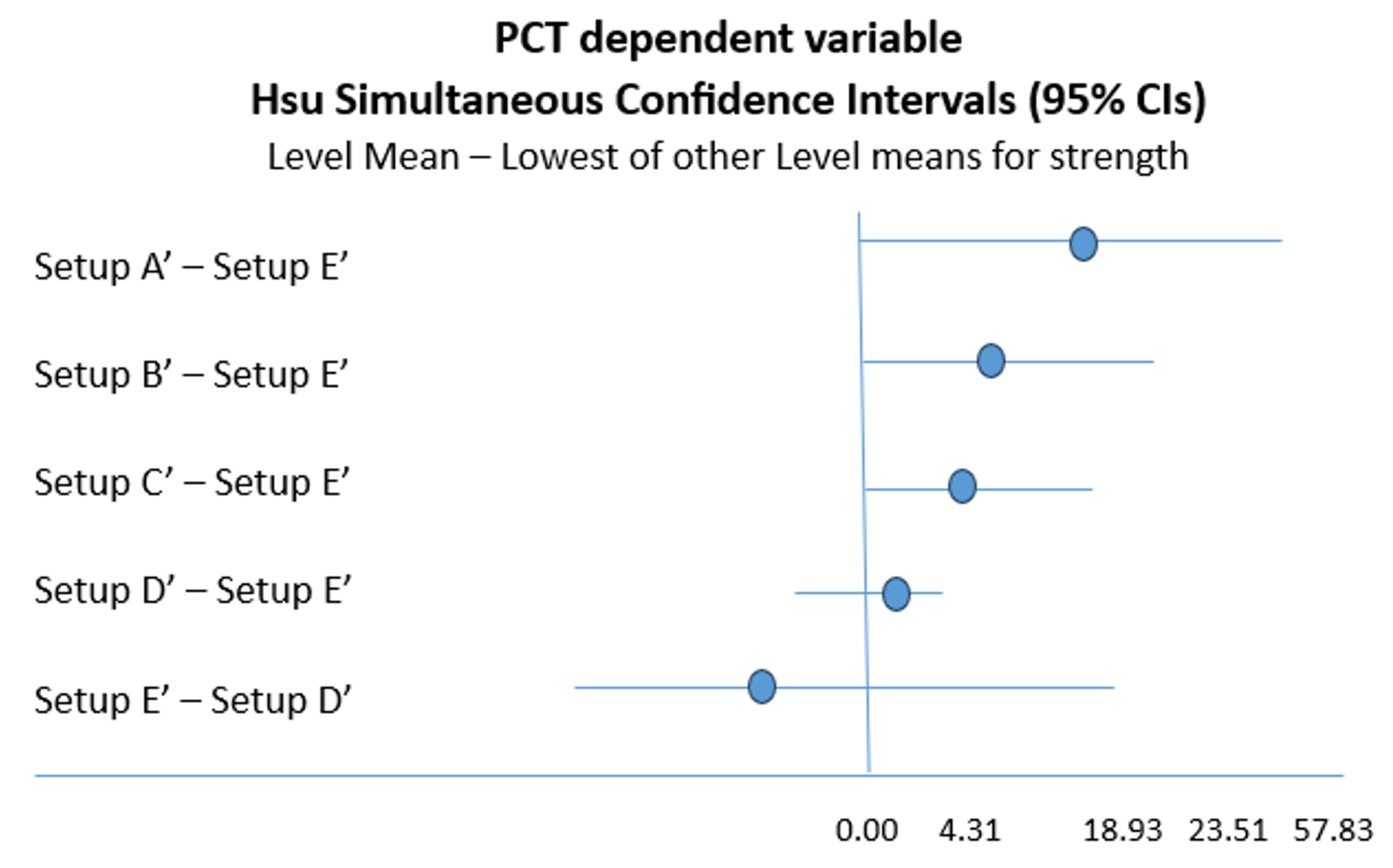
The means for setup A (196.12), setup B (161.80), setup C (157.22), and setup D (142.60) are all compared to the mean for setup E (138.29), which is the lowest (i.e., the initial sample best) mean in the PCT dimension. Then, the mean for setup E itself is compared to the mean of setup D, which is the lowest of the remaining four means. The results indicate that the confidence intervals for the difference between the mean of setup E and the means of setup A (0 to 57.83), setup B (0 to 23.51), and setup C (0 to 18.93) indicate that these differences are significant because all three intervals have a “zero” value as an endpoint. The remaining two intervals (i.e., setup D - setup E and setup E - setup D) do not have “zero” as an endpoint, which indicates that the differences are not significant (Figure 3B).
Figure 3B. Hsu’ MCB test - Simultaneous Confidence Intervals (95% CIs) for PCT case.
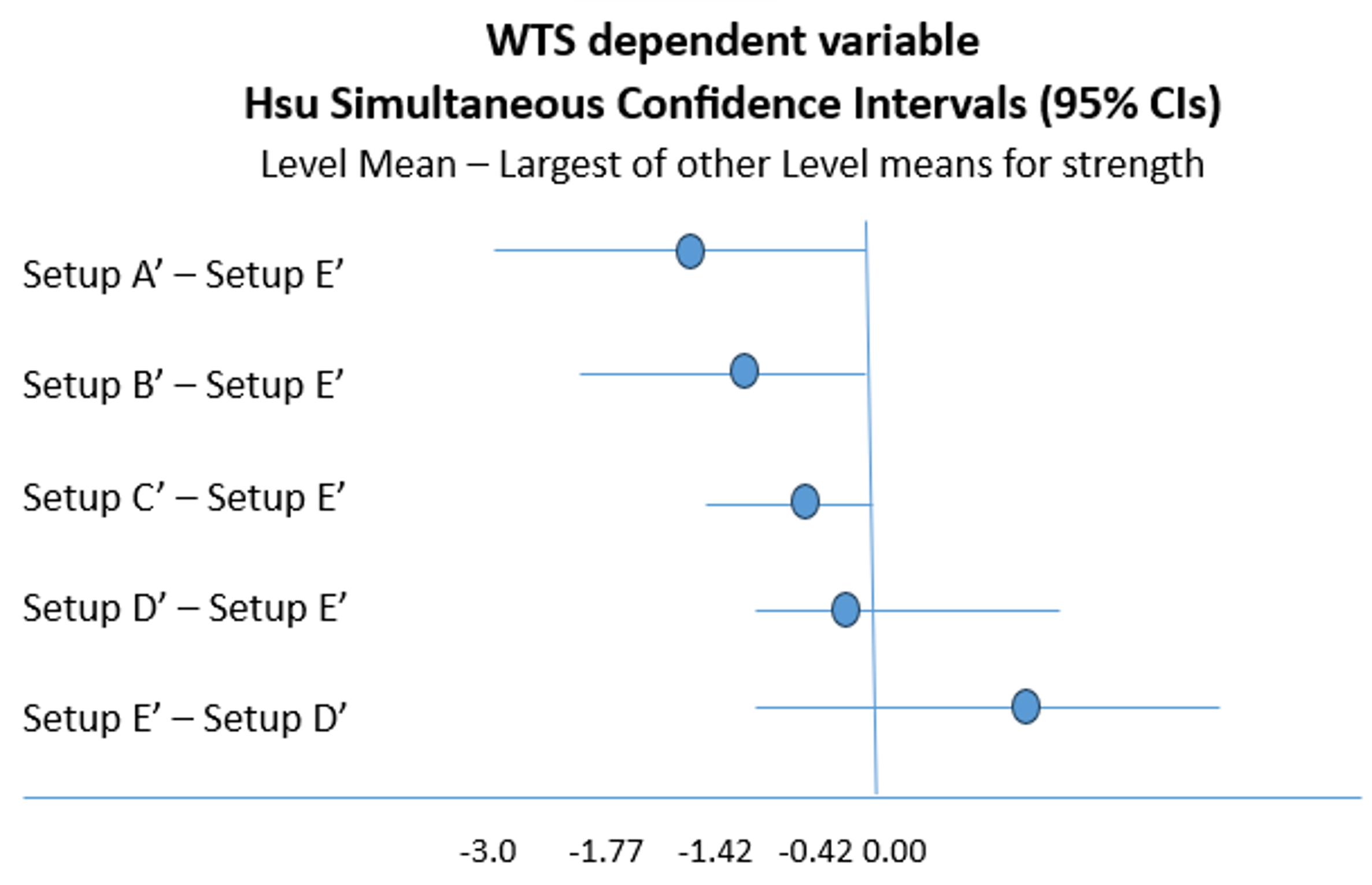
Interpretation - WTS case/daylight conditions (Table 1)
The means for setup A (1.22), setup B (2.45), setup C (2.80), and setup D (3.80) are all compared to the mean for setup E (4.22), which is the largest (i.e., the initial sample best) mean in the WTS dimension. Then, the mean for setup E itself is compared to the mean of setup D, which is the largest of the remaining four means. The results indicate that the confidence intervals for the difference between the mean of setup E and the means of setup A (-3.0 to 0), setup B (-1.77 to 0), and setup C (-1.42 to 0) indicate that these differences are significant because all three intervals have a “zero” value as an endpoint. The remaining two intervals (i.e., setup D - setup E and setup E - setup D) do not have “zero” as an endpoint, which indicates that the differences are not significant (Figure 3C).
Figure 3C. Hsu’ MCB test - Simultaneous Confidence Intervals (95% CIs) for the WTS case.
As such, according to the previous analysis and the relative Figures (Figures 3A, 3B, and 3C), the configuration setup E, which was regarded as the initial sample best setup because of its superior mean performance in the PCR, PCT, and WTS dimensions, was compared to all other setups and then identified as the final best environmental configuration setup.
Hence, according to the post hoc MCB tests, the first modeling environment route-learning process (setup A), as well as the spatial cognition knowledge acquired during this learning reorientation test, has been identified as particularly poor (about 18% less performance than the second environment (setup B, the worst case from the rest four setups). As such, environmental setup A was excluded and not discussed further in this paper (Figures 3A, 3B, and 3C).
(C) Quantitative analysis without manipulation of the three dependent route-learning variables of a cross-sectional type
After the exclusion of configuration setup A, the recorded absolute mean values of the path completion rate per environmental setup ranged from 84% (case B: route-learning with working memory based on plain primitive environmental geometry landmarks) [32,35,64] to 95% (case E: spatial cognition with visuospatial memory based on multi-feature landmarks, orthogonal boundaries landmarks, compound symmetry landmarks, and cognitive spontaneous reorientation tasks) [35,62].
Following this, the correlation between the PCT and WTP variables is described as:
• A very significant statistical association (p<0.001) in all environmental cases (p-value-centered statistical reporting) (i.e., the test statistic is converted to a probability (namely the p-value) using the probability distribution of the test statistic under the null hypothesis, and the p-value was used solely as an aid after data collection, indicating that the observed statistic for PCT and WTS was not a simple random event but indeed belonged to a unique phenomenon fitting the main hypothesis.
• A very strong negative correlation (r) in setup E (a near-perfect downhill linear relationship) while the rate-of-descent of the correlation line’s slope increases from case B to case E (i.e., for each one-unit increase in the predictor (termination time) the change in the response (satisfaction) accelerates).
Therefore, the lower the PCT (termination time performance), the greater the WTS (participant’s satisfaction) in all environmental case setups, but with greater momentum in configuration setup E (several striped walls and trees as feature landmarks within a rectangular arena rich in symmetry). Finally, the thesis statements (hypotheses I, II, and III) were statistically confirmed based on the following:
a) The PCR (mean 85.20, Std. 10.085) and WTS (mean 2.8980, Std. 1.18187) variables were correlated perfectly and positively (r = 0.980, Sig. (2-tailed) p = 0.003). The PCR and PCT (mean 159.2060, Std. 22.83941) variables were also correlated perfectly and negatively (r=-0.999, Sig. (2-tailed) p<0.001), and the WTS and PCT variables were correlated near perfectly and negatively (r=-0.977, Sig. (2-tailed) p=0.004);
b) in terms of PCR and WTS recorded values, setup A (none landmarks) < setup B (beacon landmarks) < setup C (beacon landmarks) < setup D (associative cues landmarks) < setup E (configurations landmarks); and
c) in terms of PCT recorded values: setup A (no landmarks) > setup B (beacon landmarks) > setup C (beacon landmarks) > setup D (associative cue landmarks) > setup E (configuration landmarks).
Hence, the direction and grade of the correlation/relationship per environmental setup (landmark type) and the three participants’ route-learning performance variables have been defined. Finally, as shown by the statistical analysis, setup E, which incorporates configuration landmarks, is strongly correlated to all variables and enjoys the best performance in all cases.
Table 2 demonstrates the “configuration setup” factor results in darkness conditions (means from 1,000 measures taken from 40 DCD children and 25 trials / five setups).
Similar conclusions emerge from the analysis of Table 2 (route-learning in darkness conditions). Moreover, a significant decrease was recorded in the values of all three variables, especially for the variable WTS (-12% mean reduction).
| Descriptive statistics | Correlations | ||||
| PCR | mean 80.60 | Std. 12.661 | PCR-PCT | r=-.992* | p<.001 |
| PCT | mean 191.7180 | Std. 49.22721 | PCR-WTS | r=.984* | p=.003 |
| WTS | mean 2.4460 | Std. 1.38453 | PCT-WTS | r=-.982* | p=.003 |
Table 3 illustrates the “DCD gender” factor’s route-learning comparative performance evaluation (means from 1,000 measures taken from 40 DCD children and 25 trials).
Table 3. The “DCD gender” factor: Route-learning comparative performance evaluation.
| Male DCD children | Female DCD children | |||||
|---|---|---|---|---|---|---|
| PCR | PCT | WTS | PCR | PCT | WTS | |
| Setup A | 64 | 232.11 | 0.88 | 62 | 233.08 | 0.82 |
| Setup B | 81 | 185.99 | 2.21 | 80 | 189.39 | 2.15 |
| Setup C | 83 | 171.03 | 2.63 | 80 | 171.83 | 2.62 |
| Setup D | 90 | 150.93 | 3.17 | 89 | 152.07 | 3.11 |
| Setup E | 94 | 141.52 | 4.18 | 95 | 141.88 | 4.22 |
| Effect of the “DCD gender” factor on route-learning performance dimensions | ||||||
| No significant interaction | No significant interaction | No significant interaction | No significant interaction | No significant interaction | No significant interaction | |
Note. >Note. Group A’ 20 male & Group B’ 20 female participants (mean values from 25 trials in mixed light conditions).
The mean data (from setups B, C, D, and E in daylight and darkness conditions) shown in Tables 1 and 2 were calculated and presented in Table 4 to demonstrate the configuration setup for E, which revealed better VR training functionality and excellent immersive route-learning performances for DCD children. The mean data in Table 4 demonstrate the superiority of the environmental configuration of setup E, which has an 8.16% better path completion rate, 12.37% reduction in path completion time, and 32.10% more walk-through satisfaction versus the mean prices from all significant configuration setups (B, C, D, E) (see the three rightmost columns for the evaluation results in 8.16%, 12.37%, and 32.10%).
Table 4. Setup E vs. all setups: Route-learning comparative performance evaluation.
| vs. | setup B | setup C | setup D | all setups B, C, D, E (mean) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PCR | PCT | WTS | PCR | PCT | WTS | PCR | PCT | WTS | PCR | PCT | WTS | |
| +16.67% | --- | --- | 13.17% | --- | --- | 4.42% | --- | --- | 8.16% | --- | --- | |
| PCR | ||||||||||||
| --- | 23.74% Reduction | --- | --- | 16.91% Reduction | --- | --- | 4.77% Reduction | --- | --- | 12.37% reduction | --- | |
| PCT | ||||||||||||
| --- | --- | +93.42% | --- | --- | +60.94% | --- | --- | +12.41% | --- | --- | +32.10% | |
| WTS | ||||||||||||
Note. Note. n=40-participant group mean values from 25 trials; *: Correlation is significant at the 0.010 level (2-tailed).
In the route-learning study, environmental setup E was characterized by configuration landmarks (linearity, orthogonality, symmetry, striped walls, trees, and plants) within a 3D arena with several rectangular models and spontaneous visuospatial memory-based reorientation choices from the bounded features rich in featural associative cue functionality.
Robustness Validation
In order to answer research questions RQ#10 and RQ#11 and validate the effect detected in Tables 1, 2, 3, and 4 of the environmental “configuration setup” of the three dependent variables (route-learning performance dimensions PCR, PCT, and WTS) we performed a robustness check with three (3) visualization and reality modeling software platforms as values of an independent variable (“software platform” factor) and six (6) visual trial pathways (“trial pathway” factor). Table 5 shows the results from the “software platform” factor’s robustness check evaluation (means taken from 6,000 measures taken from 40 DCD children, 6 pathways, and 25 rounds). Finally, Table 6 shows the results from the “trial pathway” factor’s robustness check evaluation (means from 3,000 measures taken from 40 DCD children, 3 software platforms, and 25 rounds).
Table 5. “Software platform”: The Robustness check / case setup E.
| n=40 DCD children VR training and learning walk-throughs using three (3) visualization reality modeling software platforms |
Path completion rate (Mean % values of 25 trials on 6 different pathways) |
Time performance (Mean values in seconds of 25 trials on 6 different pathways) |
Walk-through satisfaction (Mean scale values “1” to “5” of 25 trials on 6 different pathways) |
| LumenRT software | 94.6% (std. 4.67515) | 140.20 (std. 12.39621) | 4.10 (std. 0.83449) |
| Warp VR app | 93.5% (std. 4.67722) | 140.06 (std. 12.30277) | 4.25 (std. 0.83925) |
| Strivr app | 94.1% (std. 4.65804) | 141.49 (std. 12.28802) | 4.06 (std. 0.84114) |
| Effect of the “software platform” factor on route-learning performance dimensions | |||
| No significant interaction detected | No significant interaction detected | No significant interaction detected |
Note. n=40 DCD children, 6 visual pathways, 25 trials.
Table 6. “Trial pathway”: The Robustness check / case setup E.
| n=40 DCD children VR training and learning walk-throughs on six (6) different pathways but with fixed start (A)-finish (B) positions |
Path completion rate (Mean % values of 25 trials on 6 different pathways) |
Time performance (Mean values in seconds of 25 trials on 6 different pathways) |
Walk-through satisfaction (Mean scale values “1” to “5” of 25 trials on 6 different pathways) |
| Spatial cognition topology I | 95.3% (std. 4.82577) | 141.06 (std. 12.90201) | 4.16 (std. 0.83740) |
| Spatial cognition topology II | 93.8% (std. 4.97220) | 140.69 (std. 12.72298) | 4.22 (std. 0.83651) |
| Spatial cognition topology III | 94.9% (std. 4.88841) | 141.90 (std. 12.89162) | 4.11 (std. 0.84144) |
| Spatial cognition topology IV | 94.7% (std. 4.88890) | 141.96 (std. 12.89152) | 4.09 (std. 0.84190) |
| Spatial cognition topology V | 94.0% (std. 4.97430) | 140.70 (std. 12.73150) | 4.23 (std. 0.83699) |
| Spatial cognition topology VI | 95.1% (std. 4.86340) | 140.63 (std. 12.91049) | 4.11 (std. 0.85003) |
| Effect of the “trial pathway” factor on route-learning performance dimensions | |||
| No significant interaction | No significant interaction | No significant interaction |
Note. n=40 DCD children, 6 visual pathways, 25 trials.
The robustness check for the 40 DCD children (20 boys and 20 girls) was performed in visual daylight and darkness conditions on 3D digital environments rich in spatial compound geometries operating as landmarks with beacon functionality and district features (striped walls, trees, and plants) operating spontaneously as landmarks with associative cue functionality (reality modeling environmental case setup E) (Figure 4).
Figure 4. The 1st of the six different trial visual pathways used for the validation test.
To enhance reliability, the validation test was projected on the same 3D digital environment for setup E (rich in linearity, orthogonality, symmetry, striped walls, trees, and plants) and performed twenty-five (25) times on six (6) different pathways from starting position A to terminating position B (A→B paths).
The six (6) different trial visual pathways were projected onto six different spatial cognition topologies (arenas with environmental modeling and features) but with the same trip length and similar route-learning and walking reorientation difficulties (Figure 4). Three of these six arenas were projected in daylight lighting conditions, and the rest were projected in darkness. The intervention group was crewed with the same 20 DCD boys and 20 DCD girls (sex-balanced staffing) and was tested 450 times/participant with a 30-minute time interval between the software platforms (3 s/w platforms x 6 trial pathways x 25 rounds). The total time for performing the robustness check was 150 days (i.e., a 1-day time window for testing all 40 participants in these 3 s/w platforms on the same day x 6 (pathways) x (25 rounds)).
The mean results and the ANOVA F-distribution of the three (3) visualizations and reality modeling software (regarding path completion rate, termination time performance, and walk-through satisfaction) are displayed in Table 5. The mean results and the ANOVA F-distribution of the six (6) trial visual pathways (regarding path completion rate, termination time performance, and walk-through satisfaction) are displayed in Table 6.
The VR training functionality and the immersive learning performance (in spatial cognition testing for DCD route-learning), as they have been projected and tested to all these visualization and reality modeling software platforms, were validated statistically and enjoyed very similar results in scale-dependent variable path completion rate, scale-dependent variable time performance, and qualitative-ordinal-dependent variable walk-through (level of) satisfaction.
Discussion
The presented case study illustrated the landmark’s value in utilizing DCD children's spatial cognition. Measures of spatial working memory for locations, landmarks, cues, and geometries were used for cue- and boundary-based route learning. The presented study used a low-cost desktop VR environment for measurements and recorded the statistical distinction between plain environmental geometry landmarks (3D environments rich in linearity and orthogonality) that serve as beacons (case setup B’); compound geometry landmarks (3D arenas rich in symmetry) that serve as associative cues (case setup C’); and two configurations of landmarks (3D models rich in linearity, orthogonality, symmetry, and featural cues like striped walls and trees) that function both as beacons and associative cues for action (case setups D and E).
The research framework was described in 11 research questions. The “null hypothesis” was that the DCD route-learning performance (the dependent variable with three dimensions PCR, PCT, and WTS) is not affected by any environmental setup (the between-subjects “configuration setup” factor with five levels).
A one-way ANOVA, commonly used to test statistical differences among means of two or more interventions, was used to compare the five means from the unrelated populations (independent/dependent variables) using the F-distribution. The “null hypothesis” for the test was that the two means were equal. Hence, a significant result (in our study F>13 with p<0.05) means that the two means are “statistically unequal.” Therefore, we conclude, with a confidence level of 95%, that the influence of the independent variables on the DCD route-learning performance (PCR, PCT, WTS dimensions) is not the same (alternative hypothesis validation). The independent variables were identified by five (5) configuration setups, two (2) light conditions, two (2) DCD gender identities, three (3) software platforms, and six (6) trial pathways.
The route-learning performance was described by three terms regarded as performance dimensions and categorized as dependent variables (PCR, PCT, and WTS). In the VR reorientation trials, the dependent variable “path completion time” (PCT) was considered route-learning directional information because its value is directly affected by DCD children’s decisions to turn left or right as way-finders on route decision points. Similarly, the dependent variable “walk-through level of satisfaction” (WTS) was regarded as route-learning positional information because DCD children’s self-confidence was conceptualized by and derived from a geo-referencing recognition, and this self-confidence was transferred to satisfaction.
In explaining DCD route-learning performance, we tried to determine if a one-way interaction effect exists between the proposed five environmental setups and the dependent variables PCR, PCT, and WTS. Significant changes have been detected in route-learning performance (PCR, PCT, WTS dimensions) over the five environmental setups (one-way repeated measurement ANOVA analysis with the environmental setup as the between-subject factor and the three DCD route-learning performance indicators as within-subject factors).
The effect of the “configuration setup” factor on route-learning performance dimensions in daylight conditions (“light condition” factor) was recorded for the PCR variable as F(1,107) = 21.82, p<0.002, n2<0.62; for the PCT variable as F(1,122) = 14.93, p<0.001, n2<0.05; and for the WTS variable as F(1,155) = 16.80, p<0.0001, n 2<0.5 (Table 1).
We also examined lighting conditions as independent factors. DCD spatial memory is affected by environmental lighting conditions (daylight vs. darkness), and route learning performs better in daylight conditions (Table 1 v. Table 2). The effect of the “configuration setup” factor on route-learning performance dimensions in darkness conditions (“light condition” factor) was recorded for the PCR variable F(1,107) = 21.08, p<0.002, n2<0.33; for the PCT variable F(1,122) = 13.62, p<0.001, n2<0.05; and for the WTS variable F(1,155) = 15.41, p<0.0001, n2<0.5 (Table 2).
The calculated great F values mean that the “null hypothesis” (i.e., the influence of the five environmental setups on the DCD route-learning performance is the same) is not validated. Therefore, we conclude (with a confidence level of 95%, 0.05) in favor of the alternative hypothesis (i.e., that the environmental setup configuration affects DCD route-learning performance dimensions (PCR, PCT, and WTS)). Therefore, the recorded significant result with ANOVA F>13 means that the two means are unequal and, therefore, DCD route-learning performance is affected by the environmental setup.
Even more, to answer the stated research objective (research questions #1-#4) and research questions #5, #6, and #7 in the DCD route-learning processes (VR trials), the configuration of landmarks (i.e., case setup E: VR arena rich in linearity, orthogonality, symmetry, striped walls, trees, and plants) displayed the best directional (12.37% reduction in path termination time), positional (32.10% more walk-through satisfaction), and mission-accomplishment (8.16% better path completion rate) functionality performance.
The DCD group performed in a similar manner to route-learning training through the five setups (best performance with Setup E). The ANOVA allowed us to conclude that the influence of the five (5) setups on the DCD route-learning process is not the same. However, it did not enable us to establish the relationship between these five setups. That is, we were unable to determine which setup is the best in terms of spatial memory performance.
Next, we proceed with a multiple comparisons analysis (Hsu’s MCB) to look for specific differences between pair setups and conclude that configuration setup E was the strongest in terms of the real (i.e., not just an initial sample “best” mean) highest mean for “completion rate” (PCR) and “satisfaction” (WTS) and the real lowest mean for “time” (PCT).
Next, after determining the strongest configuration setup, we proceeded with a pair-comparison of the mean values of the three dependent variables (PCR, PCT, and WTS) for setup E vs. the significant setups of B, C, and D as well as setup E vs. the relative mean values of all four significant configuration setups together (i.e., the mean values of setups B, C, D, and E) to conclude that the environmental configuration setup E achieved the best DCD route-learning performance with an 8.16% better path completion rate, 12.37% reduction in path completion time, and 32.10% more walk-through satisfaction versus the mean prices from all significant configuration setups (B, C, D, E) (see the three rightmost columns in Table 4 for the evaluation results at 8.16%, 12.37%, and 32.10%).
Regarding landmark configurations (i.e., the configuration setup E), the highest percentage of DCD children who successfully terminated the trial pathway (test), as well as the current position and the heading toward the target (i.e., termination point B) were determined in a geo-referenced directional reorientation process. Route-learning performance accuracy achieved the lowest price in setup A and the highest one in setup E for all three dependent variables (PCR, PCT, and WTS).
Hence, all eleven (11) research questions (RQ #1-11) have been answered, and according to the ANOVA F-feasibility statistics, the DCD route-learning alternative hypothesis is validated (F>14). The F ratio is the ratio of two mean square values, and if the “null hypothesis” is true, F is anticipated to have a value close to 1.0 most of the time. In the present DCD route-learning study, the calculated large F ratio (F>13 in all cases) implies that the variation among the population (independent and dependent variables) is greater than anyone expected to see by chance.
We also examined DCD gender identities as independent factors. No interaction was observed, which indicated that DCD spatial memory does not enjoy a better route-learning performance in male or female participants (20 male, 20 female) (Table 3). For the male participants, the effect of the “DCD gender” factor on route-learning performance dimensions was recorded for the PCR variable as F(1,107) = 0.32, for the PCT variable as F(1,122) = 0.11, and for the WTS variable as F(1,155) = 0.07 (i.e., no significant interaction) (Table 3). For the female participants, the effect of the “DCD gender” factor on route-learning performance dimensions was recorded for the PCR variable as F(1,107) = 0.51 (i.e., no significant interaction); for the PCT variable as F(1,122) = 0.49 (i.e., no significant interaction); and for the WTS variable as F(1,155) = 0.72 (i.e., no significant interaction) (Table 3).
In addition, we investigated the effect of the “software platform” factor on route-learning performance dimensions. No interaction was observed, which indicated that DCD spatial memory does not enjoy better route-learning performance on a particular software platform (i.e., the proposed DCD route-learning study is visualization and reality modeling software-independent. The effect of the “software platform” factor on route-learning performance dimensions was recorded for the PCR variable as F(1,107) = 0.39 (i.e., no significant interaction); for the PCT variable as F(1,122) = 0.11 (i.e., no significant interaction); and for the WTS variable as F(1,155) = 0.03 (i.e., no significant interaction) (Table 5).
Finally, we explore the effect of the “trial pathway” factor on route-learning performance dimensions. No interaction was observed, which indicated that DCD spatial memory does not enjoy better route-learning performance in a particular visual trial pathway (i.e., the proposed DCD route-learning study is spatial cognition topology-independent). The effect of the “trial pathway” factor on route-learning performance dimensions was recorded for the PCR variable as F(1,107) = 0.76 (i.e., no significant interaction); for the PCT variable as F(1,122) = 0.82 (i.e., no significant interaction); and for the WTS variable as F(1,155) = 0.60 (i.e., no significant interaction) (Table 6).
Effectiveness - Feasibility
This narrow margin in performances statistically confirms the robustness of the proposed approach for visual training and route-learning among children with motor skill DCD disorders using linear geometries, symmetry, and features as landmarks operating as associative cues for action in controlled VR trials.
Limitations of the findings
Several factors may limit the results of this study. For example, it is important to acknowledge that the 40-child sample size is relatively small, and the children’s age range (5 to 8 years old) is relatively heterogeneous. Moreover, gaze patterns and state anxiety considerations were restricted to daylight and dark lighting conditions. Other gaze parameters and state anxiety levels like “accelerated speed with accuracy” and “route-learning in fast and explosive movements” [73-75] were not considered in the discussed route-learning approach.
Another limitation was the demanding nature of the trial, which required children to maintain their attention and motivation over a very strict time period of 2 to 4 minutes. This may have been difficult, particularly for a small sample size of children with co-occurring motion, coordination, attention, learning, and anxiety disorders, and may have contributed to performance variability.
Areas for Future Research
It is important for future research to experimentally consider gaze patterns and state or dynamic anxiety levels to fully explore their role in route-learning processes for children with motor skill disorders. Future research could explore in-depth documentation of the differences between DCD boys and girls in visual route-knowledge trials. Further studies could also investigate whether increases in VR performance translate to increases in real-world gross motor performance, walking physiology, physical activity, attitudes toward physical activity, self-confidence, and mental health.
Applications and Implications
Potential applications should include the development of flexible and parametric 3D digital VR/AR/MR apps with a variety of reconstructed natural elements, geometries, and landmarks with beacons and associative cue functionality as the necessary background for route-learning motor skill trials [44,46,50,53]. User-friendly interactive tests, apps, and VR/AR/MR visual exercises could also support human spatial cognition (route knowledge, movement improvement, motor control, and coordination refinement) [45,48,57,63,65,69].
Conclusions
The main research objective was established with the following question: “Do geometry and feature configuration landmarks provide positional and directional information to improve DCD children's route-learning, and to what extent?" (Ha).
In landmark configurations (i.e., proposed configuration setup E), the highest percentage of those DCD children who successfully terminated the visual trial test and moved toward the target (i.e., termination point B) was determined in a geo-referenced directional reorientation process. Route-learning performance accuracy achieved the lowest price in setup A and the highest one in setup E for all three dependent variables (PCR, PCT, and WTS).
First, the omnibus ANOVA test determined that the means were statistically different. Therefore, the “null hypothesis” (H0) was rejected, and the alternative one (Ha) was accepted. Then, among the five (5) candidates with the strongest configuration setup, environmental setup E was selected using the post hoc test (Hsu’s MCB method) to explore the mean differences between pairs of groups.
Hence, it was statistically proven (ANOVA and Hsu’s MCB) that DCD children’s route-learning was shown to be more stable and robust (in path completion rates, termination time performance, and walk-through satisfaction) in virtual 3D environments rich in orthogonality, symmetry, and featural associative landmark cues. In these compound environmental geometry setups, training functionality and immersive learning performance enjoyed an 8.16% better path completion rate, a 12.37% reduction in termination time, and 32.10% more training satisfaction than a reality modeling setup poor in geometry and associative cues. The robustness of the route-learning performance was statistically validated.
The presented visual trial study revealed that DCD children were significantly affected by the absence of landmarks and visual cues like spatial compound linear geometries, subconsciously leading to a slower and less safe walking physiology strategy.
Highlights
• VR environmental setups rich in geometric (linearity, orthogonality, symmetry) and associative (striped walls, trees, plants) cues enjoy a better completion rate, a reduction in termination time, and more learning satisfaction compared to clinic-based DCD training.
• Immersive VR route learning is a safe and engaging way to build DCD children's skills and self-confidence. It reduces costs, eliminates risk, and offers freedom and flexibility in content creation without geographic or scheduling limitations.
• VR route-learning for DCD children offers more engagement and interactivity compared to instructor-led training and better retention of training and learning procedures compared to physical motion control rehabilitation.
References
1. Liu Z, He Z, Yuan J, Lin H, Fu C, Zhang Y, et al. Application of Immersive Virtual-Reality-Based Puzzle Games in Elderly Patients with Post-Stroke Cognitive Impairment: A Pilot Study. Brain Sci [Internet]. 2023;13(1):1-19. doi: https://doi.org/10.3390/brainsci13010079
2. Huang K. Exergaming Executive Functions: An Immersive Virtual Reality-Based Cognitive Training for Adults Aged 50 and Older. Cyberpsychol Behav Soc Netw [Internet]. 2020;23(3):143-49. doi: https://doi.org/10.1089/cyber.2019.0269
3. Parsons TD. Virtual Reality for Enhanced Ecological Validity and Experimental Control in the Clinical, Affective and Social Neurosciences. Front Hum. Neurosci [Internet]. 2015;9:1-19. doi: https://doi.org/10.3389/fnhum.2015.00660
4. Huang LC, Yang YH. The Long-term Effects of Immersive Virtual Reality Reminiscence in People With Dementia: Longitudinal Observational Study. JMIR Serious Games [Internet]. 2022;10(3):1-9. doi: https://doi.org/10.2196/36720
5. Paredes Arturo YV, Zapata Zabala ME, Martínez Pérez JF, Germán Wilmot LJ, Cuartas Arias JM. Intellectual capacity in children with chronic malnutrition. Revista de Investigación e Innovación en Ciencias de la Salud [Internet]. 2019 Dec 31;1(2):87-95. doi: https://doi.org/10.46634/riics.27
6. Liu JYW, Yin YH, Kin Kor PP, Ki Cheung DS, Yan Zhao I, Wang S, et al. The Effects of Immersive Virtual Reality Applications on Enhancing the Learning Outcomes of Undergraduate Health Care Students: Systematic Review with Meta-synthesis. J Med Internet Res [Internet]. 2023;25:1-24. doi: https://doi.org/10.2196/39989
7. Kiper P, Szczudlik A, Agostini M, Opara J, Nowobilski R, Ventura L, et al. Virtual Reality for Upper Limb Rehabilitation in Subacute and Chronic Stroke: A Randomized Controlled Trial. Arch Phys Med Rehabil [Internet]. 2018;99(5):834-42. doi: https://doi.org/10.1016/j.apmr.2018.01.023
8. Kiper P, Agostini M, Luque-Moreno C, Tonin P, Turolla A. Reinforced Feedback in Virtual Environment for Rehabilitation of Upper Extremity Dysfunction after Stroke: Preliminary Data from a Randomized Controlled Trial. Biomed Res Int [Internet]. 2014;2014:1-8. doi: https://doi.org/10.1155/2014/752128
9. Montoya Grisales NE, González Palacio EV. Musculoskeletal disorders, stress, and life quality in professors of Servicio Nacional de Aprendizaje. Revista de Investigación e Innovación en Ciencias de la Salud [Internet]. 2022 Dec 9;4(2):5-19. doi: https://doi.org/10.46634/riics.138
10. Perez-Trejos LE, Gómez Salazar L, Ortiz Muñoz D, Arango-Hoyos G-P. Effect of a virtual reality program to improve trunk stability in Paralympic shot put and javelin throwers. A case study. Revista de Investigación e Innovación en Ciencias de la Salud [Internet]. 2022 Dec 10;4(2):34-49. doi: https://doi.org/10.46634/riics.135
11. Bernal Botero LF, Arias-Ramírez YZ, Pineda Graciano CM. Tuberous Sclerosis Complex: neuropsychological Profile and intervention proposal. Revista de Investigación e Innovación en Ciencias de la Salud [Internet]. 2020 Oct 12;2(1):98-115. doi: https://doi.org/10.46634/riics.46
12. Adamas Uribe EA. Physical Activity: relevance in phonoaudiological intervention. Revista de Investigación e Innovación en Ciencias de la Salud [Internet]. 2019 Dec 31;1(2):38-51. doi: https://doi.org/10.46634/riics.21
13. Calvache-Mora CA. Vocal parameters to determine severity of voice disorders. Revista de Investigación e Innovación en Ciencias de la Salud [Internet]. 2020 Dec 28;2(2):14-30. doi: https://doi.org/10.46634/riics.39
14. Hamari J. Gamification. In: Ritzer G, editor. The Blackwell Encyclopedia of Sociology [Internet]. John Wiley & Sons, Ltd; 2023. doi: https://doi.org/10.1002/9781405165518.wbeos1321
15. Bennett S, Rodger S, Fitzgerald C, Gibson L. Simulation in Occupational Therapy Curricula: A literature review. Aust Occup Ther J [Internet]. 2017;64(4):314-27. doi: https://doi.org/10.1111/1440-1630.12372
16. Bracq M-S, Michinov E, Jannin P. Virtual Reality Simulation in Nontechnical Skills Training for Healthcare Professionals A Systematic Review. Simul Healthc [Internet]. 2019;14(3):188-94. doi: https://doi.org/10.1097/SIH.0000000000000347
17. Rodrigues J, Coelho T, Menezes P, Restivo MT. Immersive Environments for Occupational Therapy: Pilot Study. Information [Internet]. 2020 Aug 21;11(9):1-12. doi: https://doi.org/10.3390/info11090405
18. Lim I, Cha B, Cho DR, Park EY, Lee KS, Kim MY. Safety and Potential Usability of Immersive Virtual Reality for Brain Rehabilitation: A Pilot Study. Games Health J [Internet]. 2023;12(1):34-41. doi: https://doi.org/10.1089/g4h.2022.0048
19. Hwang N-K, Shim S-H. Use of Virtual Reality Technology to Support the Home Modification Process: A Scoping Review. Int. J Environ Res Public Health [Internet]. 2021 Oct 21;18:1-17. doi: https://doi.org/10.3390/ijerph182111096
20. Fan T, Wang X, Song X, Zhao G, Zhang Z. Research Status and Emerging Trends in Virtual Reality Rehabilitation: Bibliometric and Knowledge Graph Study. JMIR Serious Games [Internet]. 2023;11:1-16. doi: https://doi.org/10.2196/41091
21. Sosa GD, Franco H. Evaluation of user experience of a computer vision-based stabilometry system in Multiple Sclerosis. Revista de Investigación e Innovación en Ciencias de la Salud [Internet]. 2019 Apr 8;1(1):7-16. doi: https://doi.org/10.46634/riics.8
22. Cheng K, Gallistel CR. Testing the geometric power of an animal’s spatial representation. In: Roitblat HL, Bever TG, Terrace HS, editors. Animal cognition: Proceedings of the Harry Frank Guggenheim conference. Hillsdale: Erlbaum; 1984. p. 409-424.
23. Cheng K. A purely geometric module in the rat’s spatial representation. Cognition [Internet]. 1986;23(2):149-78. doi: https://doi.org/10.1016/0010-0277(86)90041-7
24. Gallistel CR. The Organization of Learning. Cambridge: MIT Press; 1990. 648 p.
25. Cheng K, Huttenlocher J, Newcombe NS. 25 years of research on the use of geometry in spatial reorientation: a current theoretical perspective. Psychon Bull Rev [Internet]. 2013;20(6):1033-54. doi: https://doi.org/10.3758/s13423-013-0416-1
26. Vallortigara G. Animals as natural geometers. In: Tommasi L, Nadel L, Peterson M, editors. Cognitive Biology: Evolutionary and Developmental Perspectives on Mind, Brain and Behavior. Cambridge: MIT Press; 2009. p. 83-104.
27. Tommasi L, Chiandetti C, Pecchia T, Sovrano VA, Vallortigara G. From natural geometry to spatial cognition. Neurosci Biobehav Rev [Internet]. 2012;36(2):799-824. doi: https://doi.org/10.1016/j.neubiorev.2011.12.007
28. McGregor A, Horne MR, Esber GR, Pearce JM. Absence of Overshadowing Between a Landmark and Geometric Cues in a Distinctively Shaped Environment: A Test of Miller and Shettleworth (2007). J Exp Psychol Anim Behav Process [Internet]. 2009;35(3):357-70. doi: https://doi.org/10.1037/a0014536
29. Hermer L, Spelke ES. A geometric process for spatial reorientation in young children. Nature [Internet]. 1994;370(6484):57-9. doi: https://doi.org/10.1038/370057a0
30. Fodor JA. “The Modularity of Mind: An Essay on Faculty Psychology”. In J. Adler & L. Rips (Eds.), Reasoning: Studies of Human Inference and its Foundations. Cambridge: Cambridge University Press. [Internet]. 2008 May 5;878-914. doi: http://dx.doi.org/10.1017/cbo9780511814273.046
31. Vallortigara G, Zanforlin M, Pasti G. Geometric modules in animals’ spatial representations: a test with chicks (Gallus gallus domesticus). J Comp Psychol [Internet]. 1990;104(3):248-54. doi: https://doi.org/10.1037/0735-7036.104.3.248
32. Lee SA, Shusterman A, Spelke ES. Reorientation and landmark-guided search by young children: evidence for two systems. Psychol Sci [Internet]. 2006;17(7):577-82. doi: https://doi.org/10.1111/j.1467-9280.2006.01747.x
33. Pearce JM. The 36th Sir Frederick Bartlett Lecture: An associative analysis of spatial learning. Quart J Exp Psychol [Internet]. 2009;62(9):1665-84. doi: https://doi.org/10.1080/17470210902805589
34. Horne MR, Pearce JM. Potentiation and overshadowing between landmarks and environmental geometric cues. Learn Behav [Internet]. 2011;39(4):371-82. doi: https://doi.org/10.3758/s13420-011-0032-8
35. Lee SA, Austen JM, Sovrano VA, Vallortigara GV, McGregor A, Lever C. Distinct and combined responses to environmental geometry and features in a working-memory reorientation task in rats and chicks. Nature / Sci Rep [Internet] 2020;10:1-9. doi: https://doi.org/10.1038/s41598-020-64366-w
36. Austen JM, McGregor A. Revaluation of geometric cues reduces landmark discrimination via within-compound associations. Learn Behav [Internet]. 2014;42(4):330-36. doi: http://doi.org/10.3758/s13420-014-0150-1
37. Horne MR, Pearce JM. Between-cue associations influence searching for a hidden goal in an environment with a distinctive shape. J Exp Psychol Anim Behav Process [Internet]. 2009;35(1): 99-107. doi: https://doi.org/10.1037/0097-7403.35.1.99
38. Rhodes SEV, Creighton G, Killcross Ask, Good M, Honey RC. Integration of geometric with luminance information in the rat: Evidence from within-compound associations. J Exp Psychol Anim Behav Process [Internet]. 2009;35(1):92-8. doi: https://doi.org/10.1037/0097-7403.35.1.92
39. Pearce JM, Graham M, Good MA, Jones PM, McGregor A. Potentiation, overshadowing, and blocking of spatial learning based on-the shape of the environment. J Exp Psychol Anim Behav Process [Internet]. 2006;32(3):201-14. doi: https://doi.org/10.1037/0097-7403.32.3.201
40. Horne MR, Pearce JM. Potentiation and overshadowing between landmarks and environmental geometric cues. Learn. Behav [Internet]. 2011;39(4):371-82. doi: https://doi.org/10.3758/s13420-011-0032-8
41. Austen JM, Kosaki Y, McGregor A. Within-compound associations explain potentiation and failure to overshadow learning based on geometry by discrete landmarks. J Exp Psychol Anim Behav Process [Internet]. 2013;39(3):259-72. doi: https://doi.org/10.1037/a0032525
42. Cole MR, Gibson L, Pollack A, Yates L. Potentiation and overshadowing of shape by wall color in a kite-shaped maze using rats in a foraging task. Learn Motiv [Internet]. 2011;42(2):99-112. doi: https://doi.org/10.1016/j.lmot.2010.11.001
43. Kelly DM. Features enhance the encoding of geometry. An Cogn [Internet]. 2010;13:453-62. doi: https://doi.org/10.1007/s10071-009-0296-y
44. Basdekidou C. Bird Migration with Visual Avian Navigation & Nest Nidification: The Spatial Linear Geometries Georeferencing Functionality. OR [Internet]. 2022;17(4):30-50. doi: https://doi.org/10.9734/or/2022/v17i4371
45. Wilmut K, Barnett AL. When an object appears unexpectedly: Anticipation movement and object circumvention in individuals with and without Developmental Coordination Disorder. Exp Brain Res [Internet]. 2017;235:1531-40. doi: https://doi.org/10.1007/s00221-017-4901-z
46. Basdekidou C. Visual Contribution to Motor Skill DCD Disorders & Walking Physiology Using Spatial Cognition and Linear Geometries as Landmark Coordination Cues. OR [Internet]. 2023;18(1):10-37. doi: https://doi.org/10.9734/or/2023/v18i1375
47. Ankowski AA, Thom EE, Sandhofer CM, Blaisdell AP. Spatial Language and Children’s Spatial Landmark Use. Child Dev [Internet]. 2012 Jul 5;2012:1-15. doi: https://doi.org/10.1155/2012/427364
48. Eaves DL, Riach M, Holmes PS, Wright DJ. Motor imagery during action observation: a brief review of evidence, theory and future research opportunities. Front Neurosci [Internet]. 2016;10:1-10. doi: https://doi.org/10.3389/fnins.2016.00514
49. Słowiński P, Baldemir H, Wood G, Alizadehkhaiyat O, Coyles G, Vine S, et al. Gaze training supports the self-organization of movement coordination in children with developmental coordination disorder. Sci Rep [Internet]. 2019 Feb 8;9(1):1-11. doi: https://doi.org/10.1038/s41598-018-38204-z
50. Scott M, Wood G, Holmes P, Marshall B, Williams J, Wright D. Imagine That! Mental Training for Children with Developmental Coordination Disorder. Front. Young Minds [Internet]. 2021;9:1-8. doi: https://doi.org/10.3389/frym.2021.642053
51. Parr JVV, Foster RJ, Wood G, Hollands MA. Children With Developmental Coordination Disorder Exhibit Greater Stepping Error Despite Similar Gaze Patterns and State Anxiety Levels to Their Typically Developing Peers. Front Hum Neurosci [Internet]. 2020 Jul 28;14:1-11. doi: https://doi.org/10.3389/fnhum.2020.00303
52. Marshall B, Wright DJ, Holmes PS, Williams J, Wood G. Combined action observation and motor imagery facilitates visuomotor adaptation in children with developmental coordination disorder. Res Dev Disabil [Internet]. 2020;98:103570. doi: https://doi.org/10.1016/j.ridd.2019.103570
53. Straker LM, Campbell AC, Jensen LM, Metcalf DR, Smith AJ, Abbott RA, et al. Rationale, design, and methods for a randomized and controlled trial of the impact of virtual reality games on motor competence, physical activity, and mental health in children with developmental coordination disorder. BMC Public Health [Internet]. 2011;11:1-12. doi: https://doi.org/10.1186/1471-2458-11-654
54. Wilmut K, Williams J, Purcell C. Editorial: Current Perspectives on Developmental Coordination Disorder (DCD). Front Hum Neurosci [Internet]. 2022;16:1-3. doi: https://doi.org/10.3389/fnhum.2022.837548
55. Pinero-Pinto E, Romero-Galisteo RP, Sánchez-González MC, Escobio-Prieto I, Luque-Moreno C, Palomo-Carrión R. Motor Skills and Visual Deficits in Developmental Coordination Disorder: A Narrative Review. J Clin Med [Internet]. 2022 Dec 15;11(24):1-13. doi: https://doi.org/10.3390/jcm11247447
56. EbrahimiSani S, Sohrabi M, Taheri H, Agdasi MT, Amiri S. Effects of virtual reality training intervention on predictive motor control of children with DCD - A randomized controlled trial. Res Dev Disabil [Internet]. 2020;107:103768. doi: https://doi.org/10.1016/j.ridd.2020.103768
57. Wilson PH, Adams IL, Caeyenberghs K, Thomas P, Smits-Engelsman B, Steenbergen B. Motor imagery training enhances motor skill in children with DCD: a replication study. Res Dev Disabil [Internet]. 2016;57:54-62. doi: https://doi.org/10.1016/j.ridd.2016.06.014
58. Grohs MN, Hilderley A, Kirton A. The therapeutic potential of non-invasive neurostimulation for motor skill learning in children with neurodevelopmental disorders. Curr Dev Disord Rep [Internet]. 2019;6:19-28. doi: https://doi.org/10.1007/s40474-019-0155-8
59. Grohs MN, Craig BT, Kirton A., Dewey D. Effects of Transcranial Direct Current Stimulation on Motor Function in Children 8-12 Years With Developmental Coordination Disorder: A Randomized Controlled Trial. Front Hum Neurosci [Internet]. 2020;14:1-11. doi: https://doi.org/10.3389/fnhum.2020.608131
60. Pereira S, Bustamante A, Santos C, Hedeker D, Tani G, Garganta R, et al. Biological and environmental influences on motor coordination in Peruvian children and adolescents. Sci Rep [Internet]. 2021;11(1):1-11. doi: https://doi.org/10.1038/s41598-021-95075-7
61. Guardia G, Marsden KA, Vallejo A, Jones DL, Chadwick DR. Determining the influence of environmental and edaphic factors on the fate of the nitrification inhibitors DCD and DMPP in soil. Sci Total Environ [Internet]. 2018;624:1202-12. doi: https://doi.org/10.1016/j.scitotenv.2017.12.250
62. Shegeva S, Goel A. The Role of Symmetry in Geometric Intelligence. Baltic J Modern Computing [Internet]. 2021;9(3):260-75. doi: https://doi.org/10.22364/bjmc.2021.9.3.02
63. Kinateder M, Cooper EA. Assessing Effects of Reduced Vision on Spatial Orientation Ability Using Virtual Reality. Baltic J Modern Computing [Internet]. 2021;9(3):243-59. doi: https://doi.org/10.22364/bjmc.2021.9.3.01
64. Glöckner F, Schuck NW, Li S-C. Differential prioritization of intramaze cue and boundary information during spatial navigation across the human lifespan. Sci Rep [Internet]. 2021;11:1-16. doi: https://doi.org/10.1038/s41598-021-94530-9
65. Waller D, Lippa Y. Landmarks as beacons and associative cues: Their role in route learning. Mem Cognit [Internet]. 2007;35(5):910-24. doi: https://doi.org/10.3758/BF03193465
66. Amalric M, Wang L, Pica P, Figueira S, Sigman M, Dehaene S. The language of geometry: Fast comprehension of geometrical primitives and rules in human adults and preschoolers. PLoS Comput Biol [Internet]. 2017;13(1):1-31. doi: https://doi.org/10.1371/journal.pcbi.1005273
67. Richardson AM. Nonparametric Statistics: A Step‐by‐Step Approach. International Statistical Review [Internet]. 2015 Apr;83(1):163-4. doi: http://dx.doi.org/10.1111/insr.12095_3
68. Benjamini Y, Hochberg Y. Controlling the False Discovery Rate: A Practical and Powerful Approach to Multiple Testing. J R Stat Soc. Series B Methodol [Internet]. 1995;57(1):289-300. doi: https://doi.org/10.1111/j.2517-6161.1995.tb02031.x
69. Le Du K, Septans A-L, Maloisel F, Vanquaethem H, Schmitt A, Le Goff M, et al. A New Option for Pain Prevention Using a Therapeutic Virtual Reality Solution for Bone Marrow Biopsy (REVEH Trial): Open-Label, Randomized, Multicenter, Phase 3 Study. Journal of Medical Internet Research [Internet]. 2023 Feb 15;25:e38619. doi: https://doi.org/10.2196/38619
70. APA/American Psychiatric Association. Diagnostic and statistical manual of mental disorders [Internet]. 5th ed. Arlington: American Psychiatric Association; 2022. 1142 p. doi: https://doi.org/10.1176/appi.books.9780890425787
71. Styliadis AD. E-Learning Documentation of Historical Living Systems with 3-D Modeling Functionality. Informatica [Internet]. 2007;18(3):419-46. doi: https://doi.org/10.15388/Informatica.2007.186
72. Styliadis AD, Patias,PG, Zestas NC. 3-D Computer Modeling with Intra-Component, Geometric, Quality and Topological Constraints. Informatica [Internet]. 2003;14(3):375-92. doi: https://doi.org/10.15388/Informatica.2003.028
73. Krauze L, Ceple I, Skilters J, Delesa-Velina M, Pinna B, Krumina G. Gaze Parameters in the Analysis of Ambiguous Geometric Shapes. IPerception [Internet]. 2021 Mar 12;12(2). doi: https://doi.org/10.1177/2041669521998392
74. Parr JVV, Foster RJ, Wood G, Hollands MA. Children With Developmental Coordination Disorder Exhibit Greater Stepping Error Despite Similar Gaze Patterns and State Anxiety Levels to Their Typically Developing Peers. Front Hum Neurosci [Internet]. 2020;14:1-11. doi: https://doi.org/10.3389/fnhum.2020.00303
75. Słowiński P, Baldemir H, Wood G, Alizadehkhaiyat O, Coyles G, Vine S, et al. Gaze training supports self-organization of movement coordination in children with developmental coordination disorder. Sci Rep [Internet]. 2019;9:1-11. doi: https://doi.org/10.1038/s41598-018-38204-z
76. Gallistel CR. The Organization of Learning. Journal of Cognitive Neuroscience [Internet]. 1991;3(4):382-4. doi: http://dx.doi.org/10.1162/jocn.1991.3.4.382
77. Gallistel CR. Representations in animal cognition: An introduction. Cognition [Internet]. 1990;37(1-2):1-22. doi: https://doi.org/10.1016/0010-0277(90)90016-D
78. Gallistel CR. Learning and Representation (2008). In: Menzel R, editor. Learning and memory: A comprehensive reference. Volume 1. Learning theory and behaviour [Internet]. New York: Elsevier; 2008. p. 227-42. doi: https://doi.org/10.1016/B978-012370509-9.00082-6
79. Klatzky RL, Loomis JM, Beall AC, Chance SS, Golledge RG. Spatial Updating of Self-Position and Orientation during Real, Imagined, and Virtual Locomotion. Psychol Sci [Internet]. 1998;9(4):293-98. doi: https://doi.org/10.1111/1467-9280.00058
Abbreviations
ADL: activities of daily living
AR: augmented reality
ADHD: attention deficit / hyperactivity disorder
CAD: computer-aided design
DCD: developmental coordination disorder
GAD: generalized anxiety disorder
GUI: graphical user interface
(I)VR: (immersive) virtual reality
LD: learning disorder
MR: mixed reality
(P)OT: (pediatric) occupational therapy
RFVE: reinforced feedback in virtual environment
SPD: sensory processing difficulties
TD: children with typical development
TR: traditional rehabilitation