
Efecto de la retroalimentación visual sobre la velocidad de la marcha después de un accidente cerebrovascular: diseño de caso único
Effects of Visual Feedback on Walking Speed for Stroke Patients: Single-case Design
Resumen
Introducción: La recuperación de la marcha es uno de los principales objetivos en rehabilitación después de un ACV. Basados en los principios de aprendizaje motor, se han desarrollado nuevas estrategias en neurorrehabilitación basadas en la práctica repetitiva, orientada a la tarea y la retroalimentación. Esto último ha demostrado ser una de las variables clave para el entrenamiento, por su fácil obtención y manipulación. Sin embargo, aún no existen estudios concluyentes que permitan identificar el efecto real de esta variable y su influencia en la recuperación y el desempeño funcional de la marcha.
Objetivo: Determinar el efecto de la retroalimentación visual sobre la velocidad de la marcha después de un accidente cerebrovascular en adultos con estadios subagudos y crónicos.
Metodología: Diseño de caso único de línea de base múltiple, aleatorio no concurrente de cuatro participantes. Se evaluó la velocidad de la marcha determinando las diferencias en el nivel, la tendencia, la estabilidad de los datos y la no superposición de datos mediante el análisis visual basado en la documentación técnica para diseños de caso único de la What Works Clearinghouse.
Resultados: Cuatro participantes con rango de edad de 19 a 73 años fueron incluidos en el estudio. El cambio en el nivel para todos los participantes demostró un incremento en los valores de la velocidad de la marcha después de la introducción de la intervención (media: 0.76 m/s). El análisis visual de la tendencia estimó aceleración para la línea de intervención para tres participantes. Los datos en la fase de base e intervención cumplieron el criterio de estabilidad medido con el método de banda de dos desviaciones estándar (media: 0.05 m/s); los patrones de cambio demostraron efecto inmediato con mejoría gradual durante la intervención para los participantes 1, 3 y 4. El porcentaje de no superposición de datos mostró efectividad de la intervención para tres de los participantes (PND >91.67%).
Conclusiones: Los hallazgos presentados en este estudio representan un aporte científico que respalda la pertinencia del uso y aplicación de los principios de aprendizaje motor para el desarrollo de nuevas estrategias en rehabilitación motora. Sin embargo, este estudio constituye un primer paso para realizar estudios más robustos que incluyan replicación de las fases en el estudio y la evaluación del seguimiento para determinar la permanencia de los efectos a largo plazo.
Palabras clave
Accidente cerebrovascular; retroalimentación, velocidad al caminar; rehabilitación; robótica; estudio de caso único; fisioterapia; trastornos neurológicos de la marcha; tecnología háptica.
Abstract
Introduction: Gait recovery is one of the main goals in post-stroke rehabilitation. Based on the principles of motor learning, new strategies have been developed in neurorehabilitation based on repetitive, task-oriented practice, and feedback. The latter has proven to be one of the most critical variables for training, because it is easy to obtain and manipulate. However, there are still no conclusive studies to identify the real effect of this variable and its influence on recovery and functional gait performance.
Objective: To determine the effect of visual feedback on gait speed after stroke in adults with subacute and chronic stages.
Methodology: Single-case, multiple baseline, non-concurrent randomized, and four- participant design. Gait velocity was assessed by determining differences in level, trend, data stability, and nonoverlapping data using visual analysis based on technical documentation for single-case designs from the What Works Clearinghouse.
Results: Four participants ranging in age from 19 to 73 years were included in the study. The change in level for all participants demonstrated an increase in gait velocity values after the introduction of the intervention (mean: 0.76 m/s). Visual trend analysis estimated acceleration for the intervention line for three participants. The data in the baseline and intervention phase met the stability criterion measured with the two standard deviation band method (mean: 0.05 m/s); patterns of change demonstrated immediate effect with gradual improvement during the intervention for participants 1, 3, and 4. The percentage of nonoverlapping data showed effectiveness of the intervention for three of the participants (PND >91.67%).
Conclusions: The findings presented in this study represent a scientific contribution that supports the relevance of the use and application of motor learning principles for the development of new strategies in motor rehabilitation. However, this study constitutes a first step towards more robust studies that include replication of the phases in the study and follow-up evaluation to determine the permanence of long-term effects.
Keywords
Stroke; feedback; walking speed; rehabilitation; robotics; single-case study; physical therapy; gait disorders, neurologic; haptic technology.
Introducción
De acuerdo con la Organización Mundial de Salud, el accidente cerebrovascular (ACV) es la segunda causa de mortalidad en el mundo y la tercera más común en países de bajos ingresos, ocasionando alrededor de 4,4 millones de muertes anuales [1]. Aunque los estudios epidemiológicos más recientes muestran reducción en las tasas de mortalidad estandarizadas por la edad a nivel mundial, el número absoluto de personas que sufren un accidente cerebrovascular y que viven con discapacidad va en aumento, lo que genera consecuencias emocionales y socioeconómicas para las personas, sus familias y los servicios de salud [2,3]
Entre el 50 y el 70% de los sobrevivientes de un ACV recuperan la independencia funcional. Sin embargo, cerca del 30% permanecen con deficiencias físicas, sensoriales e intelectuales que generan discapacidad, y aproximadamente el 20% requieren cuidados institucionales por la dependencia funcional después del alta hospitalaria tras un episodio agudo [4].
La deficiencia más común y ampliamente reconocida causada por el ACV es la deficiencia motriz [5]. La hemiparesia desencadena alteraciones de la marcha relacionadas principalmente con reducción en la propulsión y asimetría cinemática o espaciotemporal, que aumentan el gasto energético, reducen la velocidad y resistencia durante la marcha e incrementan el riesgo de caída en esta población [6]. Lo anterior genera mayor dependencia funcional y necesidad de asistencia en más de la tercera parte de las actividades de la vida diaria, incluyendo el cuidado personal y la interacción social [2,7].
La recuperación de la marcha se considera uno de los principales objetivos en rehabilitación [8]. Del 65% al 95% de las personas con ACV aprenden a caminar de manera independiente aproximadamente seis meses después de la lesión; en comparación con otros individuos, invierten más tiempo entrenando la marcha que otras actividades y solo entre el 30 y 50% son capaces de deambular en comunidad [9]. Esto ha generado un incremento considerable en la investigación en rehabilitación hacia el desarrollo de nuevas estrategias para favorecer y potenciar la recuperación de la marcha posterior a un ACV [10].
De estas estrategias, la evidencia en neurorrehabilitación respalda el entrenamiento especifico con grandes dosis y altas intensidades de la práctica como principales elementos para mejorar la movilidad y la velocidad de la marcha después de un ACV [11], respaldando los hallazgos en neurociencias que promueven la incorporación de la práctica repetitiva y variable para la mejora de los procesos de neuroplasticidad y aprendizaje motor pos-ACV [12]. Así, se responde a la premisa de que el entrenamiento mejora el desempeño en términos de adquisición de nuevas habilidades y refinamiento de habilidades previamente aprendidas después de una lesión cerebral [13]. Esto significa que para que el sistema nervioso central actúe eficientemente, los programas de rehabilitación deben estar orientados por procesos de plasticidad dependientes como la práctica orientada a la tarea, la atención centrada, el entrenamiento repetitivo y la retroalimentación [14].
En los últimos años se ha demostrado que la retroalimentación es una de las variables que más impacta en la recuperación de la marcha [15]. Los sistemas de retroalimentación extrínseca determinan el desempeño de la tarea a través de la cuantificación de variables biomédicas e informan al usuario directa o indirectamente sobre una variable relevante como la fuerza, la actividad mioeléctrica, la temperatura o los torques articulares, transformando esta información en señales auditivas, visuales o hápticas fácilmente identificables por el usuario [16,17]. La retroalimentación se considera un elemento clave para la rehabilitación, dada su fácil obtención, manipulación y cuantificación en los ámbitos experimentales [18].
La retroalimentación proporciona información sobre el desempeño y los resultados en la ejecución de una tarea, con la intención de reducir los errores en la ejecución y facilitar el logro de objetivos en la recuperación [19]. Su aplicación en rehabilitación en ACV está orientada principalmente a suministrar o representar la información sensorial propioceptiva que puede verse afectada tras la lesión [6]. Este tipo de retroalimentación se utiliza en la rehabilitación de la marcha, especialmente para mejorar la longitud y el ancho de paso, el tiempo de apoyo, el control de la postura y la transferencia de peso entre las extremidades o en el tronco, los cuales son pasos obligatorios para la mejora de dicha función de caminar [20].
La estrategia utilizada en este estudio se basa en un sistema de ortesis robóticas dinámicas que combina un método de soporte de peso para el control del movimiento de las extremidades inferiores en el plano sagital durante el entrenamiento de la marcha (Lokomat®) [21]. Este sistema presenta retroalimentación extrínseca en línea durante el entrenamiento del paciente, lo que permite evaluar el desempeño durante la marcha. La información presentada al participante muestra la interacción de los torques articulares de la cadera y la rodilla con las ortesis robóticas que se representan en un gráfico lineal visible en un monitor. El propósito de esta información es brindar retroalimentación extrínseca como orientador del desempeño en las diferentes fases en el ciclo de la marcha [10].
El presente estudio está diseñado para determinar el efecto de la retroalimentación visual sobre la velocidad de la marcha durante el entrenamiento robótico de la marcha, variando únicamente la condición de suministro y no suministro de dicha información durante el entrenamiento, al aplicar un diseño de caso único. En este tipo de estudio, cada participante se convierte en su propio control, reduciendo la interferencia de variables de confusión como el género, la edad, el nivel socioeconómico y las intervenciones concurrentes [22].
Metodología
Diseño del estudio
Se realizó un estudio de caso único de línea de base múltiple, aleatorio, no concurrente en dos fases: fase de base o control (A) y fase de intervención (B). Los sujetos fueron aleatorizados para recibir 12 a 20 sesiones con el tratamiento de control (entrenamiento robótico de la marcha sin retroalimentación) antes de iniciar la intervención con entrenamiento robótico con retroalimentación visual. La aleatorización se llevó a cabo a través del método de sobres sellados.
Participantes
Cuatro personas con antecedentes de accidente cerebrovascular de no más de seis meses de evolución (tres mujeres, un hombre; edad media: 50 años; rango de 19 a 73 años) fueron reclutados mientras participaban en el proceso interdisciplinario de rehabilitación PIR® de la Clínica Universidad de la Sabana en Chía, municipio de Cundinamarca, Colombia.
Los criterios de inclusión fueron: 1) realizar marcha de manera independiente con o sin uso de producto de apoyo por al menos 10 metros, 2) presentar calificación en la evaluación del mini mental test superior a 20 puntos.
Criterios de exclusión: presentar 1) deficiencias severas visuales o auditivas, 2) enfermedades graves de origen cardiovascular, 3) peso superior a 260 libras, 4) historia reciente de lesiones traumáticas en el tronco o miembros inferior y 5) discrepancia de miembros inferiores mayor a 3 centímetros .
El estudio fue avalado por el comité de Bioética de la Universidad Autónoma de Manizales (acta 080 de 2018). Cada uno de los participantes aceptaron la intervención con la firma del consentimiento informado
La Tabla 1 presenta las características sociodemográficas de los cuatro participantes, incluyendo nivel educativo y estado cognitivo.
Tabla 1. Características sociodemográficas y clínicas de los participantes.
| Participante | Sexo | Edad | Tipo ECV | Nivel educativo | Evaluación Mini Mental Test |
|---|---|---|---|---|---|
| P01 | F | 41 | Isquémico | Superior | 28 |
| P02 | M | 73 | Hemorrágico | Superior | 30 |
| P03 | F | 19 | Hemorrágico | Superior | 27 |
| P04 | F | 69 | Isquémico | Básico | 22 |
Nota. F: Femenino; M: Masculino.
Materiales y métodos
Se evaluó la velocidad de la marcha en todos los participantes mediante la aplicación del test de marcha 10 metros, inmediatamente después de finalizar cada sesión de entrenamiento durante las fases de base (A) e intervención (B). El test de marcha 10 metros tiene excelente confiabilidad test/retest (ICC=0.95-0.99) e inter e intra-evaluador (ICC= 0.87- 0.88) para personas pos-ACV en estadios crónicos [23]. Además, cuenta con excelente correlación con instrumentos de evaluación de independencia de actividades de la vida diaria (r=0.76) [24].
Intervención
En las fases de control e intervención, los participantes realizaron entrenamiento robótico de la marcha Lokomat( 3 veces por semana durante una hora, con un soporte de peso inicio en 40% del peso corporal, progresando entre 5 al 10% en cada sesión, hasta alcanzar la tolerancia al soporte del 100%.
La velocidad de la marcha se ajustó inicialmente en 1.5 km/hora con aumentos progresivos de 0.2 km/hora en cada sesión hasta alcanzar una velocidad máxima de 3 km/hora. La fuerza guía del dispositivo fue programada al 100% al inicio del entrenamiento con reducción progresiva, hasta alcanzar el 0% según tolerancia del participante.
Para la fase de intervención, todos los participantes recibieron además retroalimentación visual, a través de la observación de un monitor que presentaba información sobre los torques articulares de la cadera y la rodilla necesarios para mantener una trayectoria predefinida en cada fase de la marcha. Por definición, un torque es positivo cuando el movimiento del participante se corrige hacia la extensión y es negativo cuando el movimiento se corrige hacia la flexión. Los torques son el resultado de la multiplicación del movimiento articular del participante por la carga de peso en cada articulación, dando como resultado una unidad de medida arbitraria que se define como unidad de biofeedback [25]. Esta información se presenta en un gráfico lineal que visualiza el participante e informa el desempeño durante la fase de apoyo y balanceo (Figura 1). El entrenamiento fue realizado por terapeutas certificados en el manejo del dispositivo robótico, ajenos a la investigación.
Figura 1. Simulación de la visualización estándar del monitor implementado en el sistema Lokomat( para suministro de retroalimentación visual.
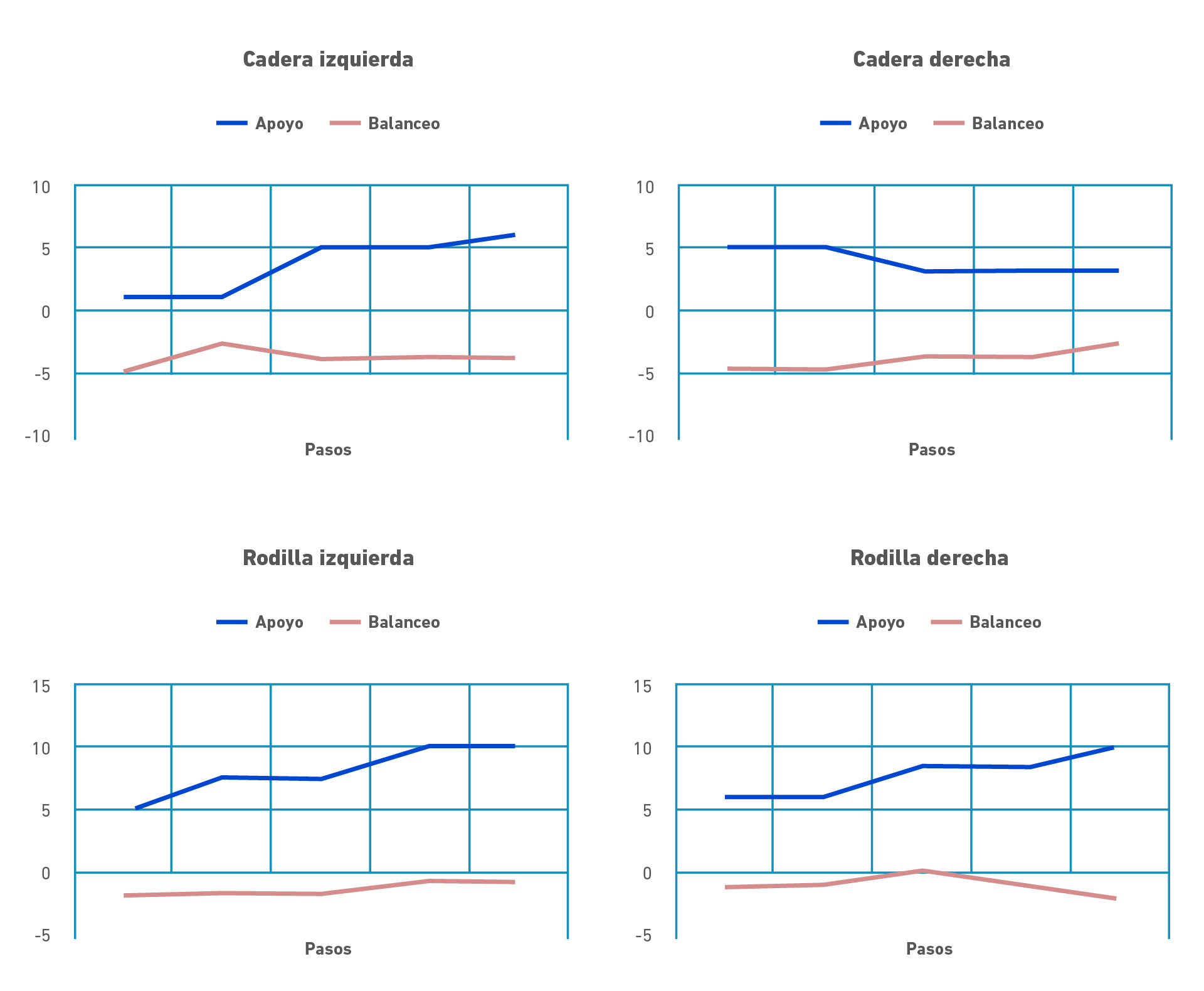
Nota. Los valores positivos especialmente en la articulación de la rodilla durante la fase de apoyo indican movimientos activos del participante, de acuerdo con las trayectorias de referencia, mientras que en las articulaciones de la cadera en el balanceo no corresponden a la trayectoria esperada, por lo que el dispositivo ejerce un torque adicional para mantener el desempeño deseado. Adaptado de Tamburella F, Moreno JC, Sofía D, Valenzuela H, Pisotta I, Iosa M, et al. Influences of the biofeedback content on robotic post-stroke gait rehabilitation: electromyographic vs joint torque biofeedback. 2019;0:1-17.
Análisis de datos
Los datos fueron analizados según las recomendaciones de la documentación técnica para diseños de caso único de la What Works Clearinghouse y la guía de publicación para diseños de caso único - SCRIBE [26,27], mediante el uso del recurso web para análisis visual de los diseños de caso único: https://manolov.shinyapps.io/Overlap [28]. Se examinó y comparó cada una de las fases para determinar las diferencias en el nivel, la tendencia de cambio, la estabilidad, el efecto inmediato y la no superposición de datos para cada participante.
El valor de la mediana de los datos se usó para determinar los cambios en el nivel en cada fase; la dirección de la tendencia se calculó a través del estimador Theil-Sen, también conocido como estimador de pendiente de Sen o el método de ajuste de Kendall [29].
La estabilidad de los datos se determinó calculando el porcentaje de datos que caían encima o por debajo del 20% del valor de la mediana de datos, a través del método de banda de dos desviaciones estándar; se satisface un criterio de estabilidad si el 80% de los datos caen en este rango [30].
Por último, la no superposición de los datos (PND) se estimó a través del índice de no superposición. Este índice cuantifica la proporción de datos en la fase de intervención (B) que no se superponen en la fase de base (A). Los estadísticos de no superposición se escalan típicamente como porcentaje de 0 a 100. Así, un porcentaje menor a 50 no denota efecto de la intervención, porcentaje entre el 50 y 70 demuestra un efecto cuestionable y más del 70% sugiere que la intervención fue efectiva [31].
Resultados
Análisis visual
Las Figuras 2, 3, 4 y 5 muestran la gráfica de datos de cada participante utilizadas para el análisis visual durante la fase de base (A) y la fase de intervención (B), separadas por la línea vertical continua. El eje “x” representa el valor de la velocidad de la marcha y el eje “y” la cantidad de sesiones para cada una de las fases.
Figura 2. Análisis visual para el participante 1 demostrando: a) nivel, b) tendencia, c) estabilidad de los datos, d) efecto inmediato y e) la no superposición de los datos (PND)

Figura 3. Análisis visual para el participante 2 demostrando: a) nivel, b) tendencia, c) estabilidad de los datos, d) efecto inmediato y e) la no superposición de los datos (PND)
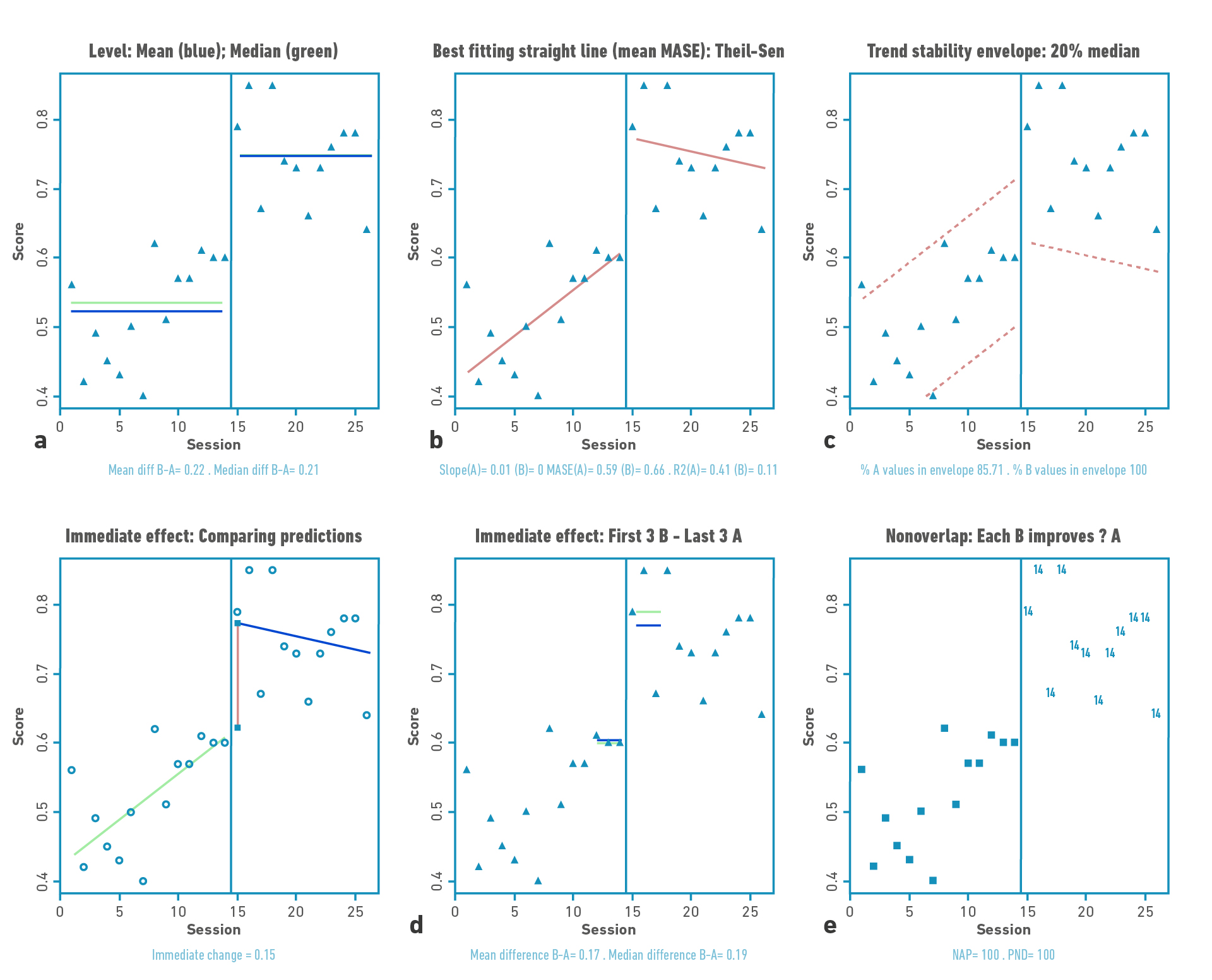
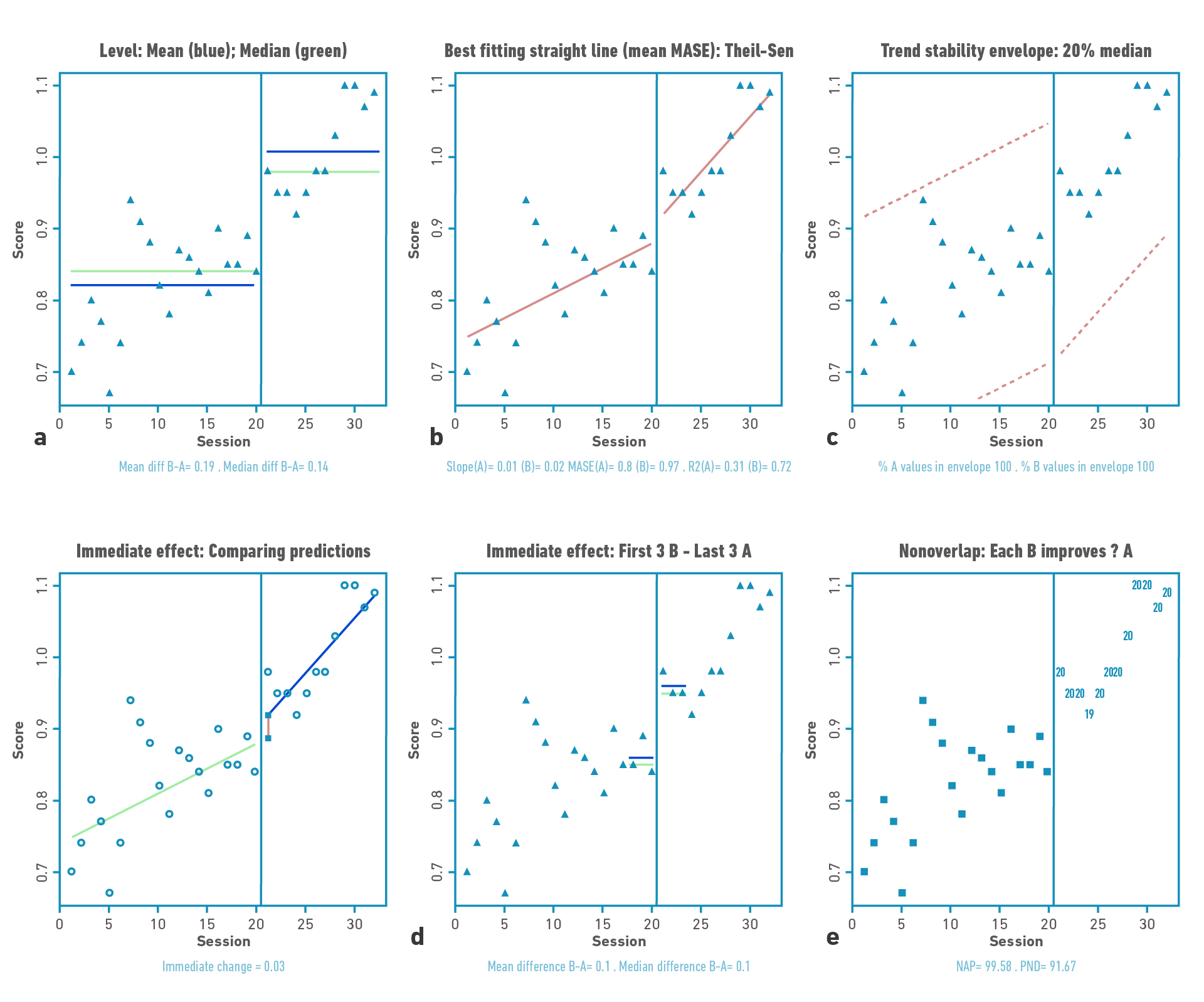
Figura 4. Análisis visual para el participante 3 demostrando: a) nivel, b) tendencia, c) estabilidad de los datos, d) efecto inmediato y e) la no superposición de los datos (PND)
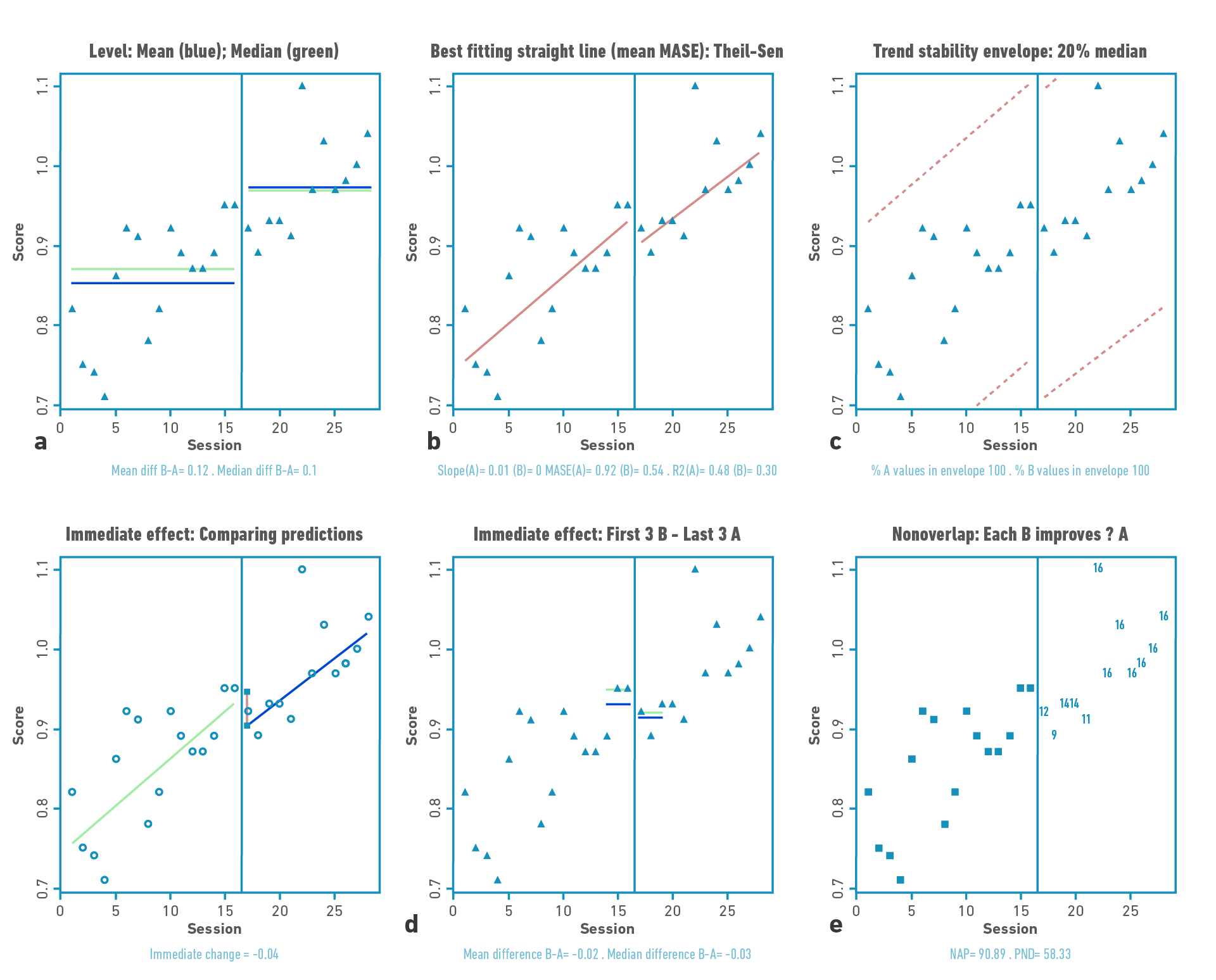
Figura 5. Análisis visual para el participante 4 demostrando: a) nivel, b) tendencia, c) estabilidad de los datos, d) efecto inmediato y e) la no superposición de los datos (PND)
Cambios en el nivel
La Tabla 2 muestra los cambios en el nivel (la mediana) y la desviación estándar de los datos para la fase de base y la fase de intervención en cada participante. Para todos los participantes se encontraron cambios positivos en el nivel de los datos. Los valores de la velocidad de la marcha fueron superiores en todos los participantes en la fase de intervención en comparación con la fase de base (media:0.76 m/s); con diferencia en la mediana de la fase intervención y la de base entre 0.1 y 0.21 m/s. Los cambios más elevados se presentaron en los participantes 1 y 2.
Tabla 2. Valores de la mediana y desviación estándar de los datos para cada participante en cada fase.
| Sujeto | Mediana fase de base (m/s) (DE) | Mediana fase de intervención (m/s) (DE) |
|---|---|---|
| P01 | 0.23 (0.03) | 0.34 (0.03) |
| P02 | 0.54 (0.07) | 0.75(0.07) |
| P03 | 0.87(0.07) | 0.97(0.06) |
| P04 | 0.84(0.07) | 0.98(0.07) |
Cambios en la tendencia de los datos
La tendencia de los datos muestra ascenso o descenso de la variable de estudio en el análisis visual. Para la presente investigación, la tendencia de los datos hacia el ascenso demuestra mejoría. El análisis visual de la tendencia demuestra aceleración para la tendencia (incremento de los valores de la velocidad de la marcha a través del tiempo) de la línea de intervención para los participantes P01, P03 y P04.
Análisis estadístico
Estabilidad de los datos: método de banda de dos desviaciones estándar
Cada una de las líneas de base (A) e intervención (B) de cada participante cumplió el criterio de estabilidad según el método de banda de dos desviaciones estándar [32]. Para todos los participantes, más del 80% de los datos se mantuvieron en el rango establecido, indicando estabilidad de los datos tanto en la fase de base como en la fase de intervención.
Efecto inmediato: patrones de cambio
Se identifican dos patrones de cambio en respuesta a la intervención. El primer patrón fue un cambio inmediato al comienzo del entrenamiento (media: 0.15 m/s), seguido por una leve mejora adicional a lo largo de la fase de intervención, pero con descenso en la tendencia de los datos en esta fase (sin efecto dentro del entrenamiento), aplicable para el participante 2.
El segundo patrón fue un cambio inmediato, seguido de una mejoría gradual y continua durante la fase de intervención (efecto continuo durante el entrenamiento), aplicable para los participantes 1, 3 y 4. El participante 1 demostró un patrón de cambio inmediato elevado (media: 0.09 m/s) con efecto continuo durante la intervención, mientras que los participantes 3 y 4 se caracterizaron por un patrón de cambio inmediato más discreto (media: 0.04 y 0.03 m/s) con efecto continuo durante la intervención.
Porcentaje de no superposición de datos
Para el presente estudio, un incremento en los valores de resultado localizaría los puntos en el análisis visual más elevados en la fase de intervención versus la fase de base. El porcentaje de no superposición demostró efecto de la intervención para los participantes 1, 2 y 4 (>91.67%) y efecto cuestionable para el participante 3 (58.3%).
Discusión
Desde la investigación en neurociencias, son diversas las variables del entrenamiento que determinan el proceso de aprendizaje motor. La mayoría de ellas se relacionan con el tipo de práctica, la repetición, el entrenamiento orientado a la tarea, la especificidad y fundamentalmente la retroalimentación, siendo esta última una de las variables más críticas para el entrenamiento en rehabilitación [25]. Basados en este concepto, el presente estudio tuvo como objetivo determinar el efecto de la retroalimentación visual sobre la velocidad de la marcha durante el entrenamiento robótico, al variar únicamente la condición de suministro y no suministro de dicha información, aplicando un diseño de caso único. La hipótesis planteada en este estudio formuló que el entrenamiento robótico con retroalimentación visual mejoraba la ejecución de la marcha en términos temporales, específicamente en la velocidad de la marcha.
De acuerdo con los principios de análisis de los diseños de caso único, el criterio experimental fue moderado, al demostrar incrementos en la velocidad de la marcha en los primeros cinco días después de la introducción del entrenamiento para los casos 1, 2 y 4, esto asociado al patrón de cambio de los datos reportados para cada caso. Los cambios positivos en la velocidad de la marcha se relacionan principalmente al reconocimiento del movimiento articular de la cadera y la rodilla, guiado por las ortesis dinámicas del sistema Lokomat®, lo que permite mantener una adecuada longitud de paso, mayor libertad en el balanceo, estabilidad en el apoyo y mantener la dirección de progresión [14].
Pak y Lee [33] describieron efectos similares en un estudio de retroalimentación visual durante el entrenamiento de sentadilla con cambio gradual en el soporte de peso en la extremidad parética en adultos con antecedentes de ACV. Los resultados demuestran mejoría en la actividad muscular, el balance y la marcha, indicando que los marcadores visuales tienen un efecto primario sobre el control y el aprendizaje del movimiento, lo que mejora específicamente la transferencia de peso para el control del equilibrio y la estabilidad de la extremidad afectada [33].
Por su parte, Genthe et al. [34] demostraron cambios en la propulsión de la pierna parética después de un entrenamiento de la marcha con retroalimentación visual en tiempo real en nueve personas posACV. El entrenamiento con retroalimentación generó aumento significativo en la longitud de paso de la extremidad parética, indicando que durante la marcha la extremidad parética se ubicó más atrás durante la fase de apoyo terminal, lo que modificó a su vez patrones en el desempeño muscular de la extremidad parética y redujo las compensaciones en la extremidad sana [34]. Durante el entrenamiento de la marcha, el uso de señales visuales en tiempo real ha demostrado resultados favorables en términos de la distribución de peso y la simetría en el apoyo, lo que contribuye de manera positiva en la mejoría de la velocidad y el balance durante la marcha.
Kim y Oh [35] combinaron el entrenamiento de marcha en tapiz rodante con el uso de retroalimentación visual en tiempo real en adultos con hemiparesia secundaria a un ACV, demostrando aumento en la longitud de paso, la longitud de zancada y en el tiempo de apoyo. Además, reportaron mejoría en la evaluación del balance utilizando el test de Timed get up and Go. Estos hallazgos sugieren que el entrenamiento orientado a la tarea con retroalimentación visual favorece no solamente la ejecución de la tarea en si misma, sino además la transferencia del aprendizaje en actividades funcionales que comparten características espaciotemporales durante su ejecución [35].
Basados en estos hallazgos, el presente estudio confirma la relevancia de la aplicación y el uso de principios de aprendizaje motor para la rehabilitación de las personas con déficit neurológico. En general, los cambios neuroplásticos reportados en el sistema nervioso central después de una lesión son dependientes de la actividad y están fuertemente asociados a la aplicación de los principios de aprendizaje motor en el entorno rehabilitador.
Conclusiones
El uso de retroalimentación visual durante el entrenamiento de la marcha ha sido ampliamente investigado. Sin embargo, algunos estudios que presentan hallazgos significativos presentan algunas limitaciones: la mayoría de ellos compara los grupos intervención con entrenamiento convencional y consideran dentro de la intervención estrategias adicionales que se ha comprobado potencian el aprendizaje, como la práctica masiva y repetitiva y los sistemas de soporte de peso en banda sin fin. Esto genera dificultades para determinar el efecto real de la retroalimentación visual durante el entrenamiento [18].
Por otro lado, la naturaleza, la cantidad y frecuencia de la retroalimentación extrínseca juegan un papel importante en su efectividad. No obstante, no ha sido posible determinar de manera concluyente cuáles son las características y tipos de retroalimentación más apropiadas y esenciales para favorecer el proceso de aprendizaje [36].
Los resultados presentados en este estudio evidenciaron un efecto positivo del entrenamiento robótico de la marcha con retroalimentación visual sobre la velocidad de la marcha en todos los participantes en esta investigación. Aunque los patrones de cambio y el efecto inmediato no fue el mismo en todos los participantes, sí se destaca una mejoría en el nivel de los datos durante la intervención, lo que demuestra la importancia de la retroalimentación visual como orientador del desempeño en el entrenamiento rehabilitador para el entrenamiento de la marcha. Sin embargo, estos mismos deben verse con precaución, debido a las limitaciones derivadas de la no replicación de las fases dentro del estudio y el diseño del estudio en sí mismo, el cual presenta limitaciones en comparación con los ensayos clínicos contralados, como los son principalmente el tamaño de la muestra y el uso de análisis estadístico más extenso.
Con relación a los resultados descritos, la falta de seguimiento limita la posibilidad de describir posibles efectos a largo plazo derivados de la intervención presentada. De la misma manera, todos los participantes deambulaban de manera independiente previo a la participación en la investigación, lo que hace imposible generalizar los resultados a otro tipo de población que no comparta dicha característica.
Por otro lado, el diseño utilizado en esta investigación es un diseño que en los últimos años ha empezado a tener uso y reconocimiento en las ciencias de la rehabilitación, por lo que en la mayoría de los casos se desconoce su confiabilidad y validez. Por lo tanto, se recomienda al lector profundizar en su revisión para comprender la forma en que este tipo de diseño permite generar conclusiones validas aplicables a la práctica clínica.
Referencias
1. Feigin VL, Norrving B, Mensah GA. Global Burden of Stroke. Circ Res. 2017;120:439-48. doi: https://doi.org/10.1161/CIRCRESAHA.116.308413
2. Chamarro-lusar A, Medina-casanovas J. Walking speed as a predictor of community mobility and quality of life after stroke. Top Stroke Rehabil. 2019;26:349-58. doi: https://doi.org/10.1080/10749357.2019.1605751
3. Saini V, Guada L, Yavagal DR. Global Epidemiology of Stroke and Access to Acute Ischemic Stroke Interventions. Neurology. 2021;97:S6-16. doi: https://doi.org/10.1212/WNL.0000000000012781
4. Lui SK, Nguyen MH. Elderly Stroke Rehabilitation: Overcoming the Complications and Its Associated Challenges. Curr Gerontol Geriatr Res. 2018;2018:1-9. doi: https://doi.org/10.1155/2018/9853837
5. Roelker SA, Bowden MG, Kautz SA, Neptune RR. Paretic propulsion as a measure of walking performance and functional motor recovery post-stroke: A review. Gait Posture. 2019;68:6-14. doi: https://doi.org/10.1016/j.gaitpost.2018.10.027
6. Beyaert C, Vasa R, Frykberg GE. Gait post-stroke: Pathophysiology and rehabilitation strategies. Neurophysiologie Clinique/Clinical Neurophysiology. 2015;45:335-55. doi: https://doi.org/10.1016/j.neucli.2015.09.005
7. Wonsetler EC, Bowden MG. A systematic review of mechanisms of gait speed change post-stroke. Part 2: exercise capacity, muscle activation, kinetics, and kinematics. Top Stroke Rehabil. 2017;24:394-403. doi: https://doi.org/10.1080/10749357.2017.1282413
8. Selves C, Stoquart G, Lejeune T. Gait rehabilitation after stroke: review of the evidence of predictors, clinical outcomes and timing for interventions. Acta Neurol Belg. 2020;120:783-90. doi: https://doi.org/10.1007/s13760-020-01320-7
9. Schröder J, Truijen S, Criekinge T, Saeys W. Feasibility and effectiveness of repetitive gait training early after stroke: A systematic review and meta-analysis. J Rehabil Med. 2019;51:78-88. doi: https://doi.org/10.2340/16501977-2505
10. Esquenazi A, Lee S, Wikoff A, Packel A, Toczylowski T, Feeley J. A Comparison of Locomotor Therapy Interventions: Partial-Body Weight−Supported Treadmill, Lokomat, and G-EO Training in People With Traumatic Brain Injury. PM&R. 2017;9:839-46. doi: https://doi.org/10.1016/j.pmrj.2016.12.010
11. Hornby TG, Reisman DS, Ward IG, Scheets PL, Miller A, Haddad D, et al. Clinical Practice Guideline to Improve Locomotor Function Following Chronic Stroke, Incomplete Spinal Cord Injury, and Brain Injury. Journal of Neurologic Physical Therapy. 2020;44:49-100. doi: https://doi.org/10.1097/NPT.0000000000000303
12. Rendos NK, Zajac-Cox L, Thomas R, Sato S, Eicholtz S, Kesar TM. Verbal feedback enhances motor learning during post-stroke gait retraining. Top Stroke Rehabil. 2021;28:362-77. doi: https://doi.org/10.1080/10749357.2020.1818480
13. Mendes FA dos S, Pompeu JE, Lobo AM, da Silva KG, Oliveira T de P, Zomignani AP, et al. Motor learning, retention and transfer after virtual-reality-based training in Parkinson’s disease - effect of motor and cognitive demands of games: A longitudinal, controlled clinical study. Physiotherapy (United Kingdom). 2012;98:217-23. doi: https://doi.org/10.1016/j.physio.2012.06.001
14. Pignolo L, Basta G, Carozzo S, Bilotta M, Todaro MR, Serra S, et al. A body-weight-supported visual feedback system for gait recovering in stroke patients: A randomized controlled study. Gait Posture. 2020;82:287-93. doi: https://doi.org/10.1016/j.gaitpost.2020.09.020
15. Hasegawa N, Takeda K, Sakuma M, Mani H, Maejima H. Gait & Posture Learning effects of dynamic postural control by auditory biofeedback versus visual biofeedback training. Gait Posture. 2017;58:188-93. doi: https://doi.org/10.1016/j.gaitpost.2017.08.001
16. Walker ER, Hyngstrom AS, Schmit BD. Influence of visual feedback on dynamic balance control in chronic stroke survivors. J Biomech. 2016;49:698-703. doi: https://doi.org/10.1016/j.jbiomech.2016.01.028
17. Shin J, Chung Y. Influence of visual feedback and rhythmic auditory cue on walking of chronic stroke patient induced by treadmill walking in real-time basis. NeuroRehabilitation. 2017;41:445-52. doi: https://doi.org/10.3233/NRE-162139
18. Druzbicki M, Przysada G, Guzik A, Brzozowska-Magoń A, Kołodziej K, Wolan-Nieroda A, et al. The efficacy of gait training using a body weight support treadmill and visual biofeedback in patients with subacute stroke: A randomized controlled trial. Biomed Res Int. 2018. doi: https://doi.org/10.1155/2018/3812602
19. Proulx CE, Louis Jean MT, Higgins J, Gagnon DH, Dancause N. Somesthetic, Visual, and Auditory Feedback and Their Interactions Applied to Upper Limb Neurorehabilitation Technology: A Narrative Review to Facilitate Contextualization of Knowledge. Frontiers in Rehabilitation Sciences. 2022;3. doi: https://doi.org/10.3389/fresc.2022.789479
20. Kim J-S, Oh D-W. Use of real-time visual feedback during overground walking training on gait symmetry and velocity in patients with post-stroke hemiparesis: randomized controlled, single-blind study. International Journal of Rehabilitation Research. 2020;43:247-54. doi: https://doi.org/10.1097/MRR.0000000000000419
21. van Kammen K, Boonstra AM, van der Woude LH v., Visscher C, Reinders-Messelink HA, den Otter R. Lokomat guided gait in hemiparetic stroke patients: the effects of training parameters on muscle activity and temporal symmetry. Disabil Rehabil. 2020;42:2977-85. doi: https://doi.org/10.1080/09638288.2019.1579259
22. Lobo MA, Moeyaert M, Baraldi Cunha A, Babik I. Single-Case Design, Analysis, and Quality Assessment for Intervention Research. Journal of Neurologic Physical Therapy 2017. https://doi.org/10.1097/NPT.0000000000000187
23. Cheng DK, Nelson M, Brooks D, Salbach NM. Validation of stroke-specific protocols for the 10-meter walk test and 6-minute walk test conducted using 15-meter and 30-meter walkways. Top Stroke Rehabil. 2020;27:251-61. doi: https://doi.org/10.1080/10749357.2019.1691815
24. Dalgas U, Severinsen K, Overgaard K. Relations Between 6 Minute Walking Distance and 10 Meter Walking Speed in Patients With Multiple Sclerosis and Stroke. Arch Phys Med Rehabil. 2012;93:1167-72. doi: https://doi.org/10.1016/j.apmr.2012.02.026
25. Tamburella F, Moreno JC, Sofía D, Valenzuela H, Pisotta I, Iosa M, et al. Influences of the biofeedback content on robotic post-stroke gait rehabilitation: electromyographic vs joint torque biofeedback. J NeuroEngineering Rehabil. 2019;16:95. doi: https://doi.org/10.1186/s12984-019-0558-0
26. Kratochwill, T.R; Hitchcock J. Single-case design technical documentation. 2010. Disponible en: https://files.eric.ed.gov/fulltext/ED510743.pdf
27. Tate RL, Perdices M, Rosenkoetter U, Shadish W, Vohra S, Barlow DH, et al. The Single-Case Reporting Guideline In BEhavioural Interventions (SCRIBE) 2016 Statement. Phys Ther. 2016;96:e1-10. doi: https://doi.org/10.2522/ptj.2016.96.7.e1
28. Lane JD, Gast DL. Visual analysis in single case experimental design studies: Brief review and guidelines. Neuropsychol Rehabil. 2014;24:445-63. doi: https://doi.org/10.1080/09602011.2013.815636
29. Arnout Tilgenkamp. Theil-Sen estimator: Robust regression for slope estimation between 1 dimensional X and y. Version 1.0 [software]. Disponible en: https://www.mathworks.com/matlabcentral/fileexchange/34308-theil-sen-estimator?s_tid=FX_rc2_behav
30. Bulté I, Onghena P. The Single-Case Data Analysis Package: Analysing Single-Case Experiments with R Software. Journal of Modern Applied Statistical Methods. 2013;12:450-78. doi: https://doi.org/10.22237/jmasm/1383280020
31. Krasny-Pacini A, Evans J. Single-case experimental designs to assess intervention effectiveness in rehabilitation: A practical guide. Ann Phys Rehabil Med. 2018;61:164-79. doi: https://doi.org/10.1016/j.rehab.2017.12.002
32. Gast DL. Single Subject Research Methodology in Behavioral Sciences. 1st ed. Georgia: Routledge; 2010.
33. Pak NW, Lee JH. Effects of visual feedback training and visual targets on muscle activation, balancing, and walking ability in adults after hemiplegic stroke: A preliminary, randomized, controlled study. International Journal of Rehabilitation Research. 2020:76-81. doi: https://doi.org/10.1097/MRR.0000000000000376
34. Genthe K, Schenck C, Eicholtz S, Zajac-cox L, Kesar TM, Rehabilitation N, et al. Effects of real-time gait biofeedback on paretic propulsion and gait biomechanics in individuals post-stroke. Top Stroke Rehabil. 2019;25:186-93. doi: https://doi.org/10.1080/10749357.2018.1436384.Effects
35. Kim J, Oh D. Use of real-time visual feedback during overground walking training on gait symmetry and velocity in patients with post- stroke hemiparesis: randomized controlled, single-blind study. International Journal of Rehabilitation Research. 2020;43(3):247-54. doi: https://doi.org/10.1097/MRR.0000000000000419
36. Lewek MD, Feasel J, Wentz E, Brooks FP, Whitton MC. Use of Visual and Proprioceptive Feedback to Improve Gait Speed and Spatiotemporal Symmetry Following Chronic Stroke: A Case Series. Phys Ther. 2012;92:748-56. doi: https://doi.org/10.2522/ptj.20110206